mirror of
https://github.com/bevyengine/bevy
synced 2025-02-18 23:18:43 +00:00
# Objective Now that we can consolidate Bundles and Components under a single insert (thanks to #2975 and #6039), almost 100% of world spawns now look like `world.spawn().insert((Some, Tuple, Here))`. Spawning an entity without any components is an extremely uncommon pattern, so it makes sense to give spawn the "first class" ergonomic api. This consolidated api should be made consistent across all spawn apis (such as World and Commands). ## Solution All `spawn` apis (`World::spawn`, `Commands:;spawn`, `ChildBuilder::spawn`, and `WorldChildBuilder::spawn`) now accept a bundle as input: ```rust // before: commands .spawn() .insert((A, B, C)); world .spawn() .insert((A, B, C); // after commands.spawn((A, B, C)); world.spawn((A, B, C)); ``` All existing instances of `spawn_bundle` have been deprecated in favor of the new `spawn` api. A new `spawn_empty` has been added, replacing the old `spawn` api. By allowing `world.spawn(some_bundle)` to replace `world.spawn().insert(some_bundle)`, this opened the door to removing the initial entity allocation in the "empty" archetype / table done in `spawn()` (and subsequent move to the actual archetype in `.insert(some_bundle)`). This improves spawn performance by over 10%: 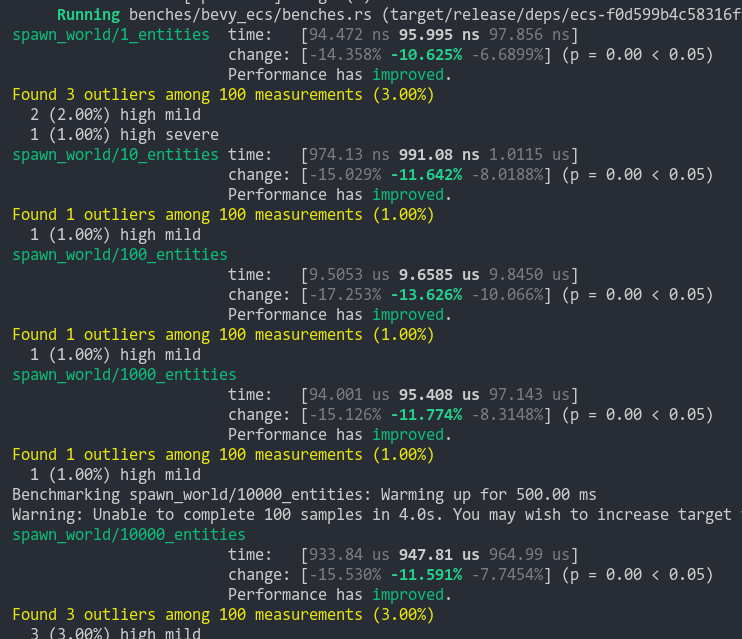 To take this measurement, I added a new `world_spawn` benchmark. Unfortunately, optimizing `Commands::spawn` is slightly less trivial, as Commands expose the Entity id of spawned entities prior to actually spawning. Doing the optimization would (naively) require assurances that the `spawn(some_bundle)` command is applied before all other commands involving the entity (which would not necessarily be true, if memory serves). Optimizing `Commands::spawn` this way does feel possible, but it will require careful thought (and maybe some additional checks), which deserves its own PR. For now, it has the same performance characteristics of the current `Commands::spawn_bundle` on main. **Note that 99% of this PR is simple renames and refactors. The only code that needs careful scrutiny is the new `World::spawn()` impl, which is relatively straightforward, but it has some new unsafe code (which re-uses battle tested BundlerSpawner code path).** --- ## Changelog - All `spawn` apis (`World::spawn`, `Commands:;spawn`, `ChildBuilder::spawn`, and `WorldChildBuilder::spawn`) now accept a bundle as input - All instances of `spawn_bundle` have been deprecated in favor of the new `spawn` api - World and Commands now have `spawn_empty()`, which is equivalent to the old `spawn()` behavior. ## Migration Guide ```rust // Old (0.8): commands .spawn() .insert_bundle((A, B, C)); // New (0.9) commands.spawn((A, B, C)); // Old (0.8): commands.spawn_bundle((A, B, C)); // New (0.9) commands.spawn((A, B, C)); // Old (0.8): let entity = commands.spawn().id(); // New (0.9) let entity = commands.spawn_empty().id(); // Old (0.8) let entity = world.spawn().id(); // New (0.9) let entity = world.spawn_empty(); ```
{kind=link}
171 lines
5.8 KiB
Rust
171 lines
5.8 KiB
Rust
//! Skinned mesh example with mesh and joints data defined in code.
|
|
//! Example taken from <https://github.com/KhronosGroup/glTF-Tutorials/blob/master/gltfTutorial/gltfTutorial_019_SimpleSkin.md>
|
|
|
|
use std::f32::consts::PI;
|
|
|
|
use bevy::{
|
|
pbr::AmbientLight,
|
|
prelude::*,
|
|
render::mesh::{
|
|
skinning::{SkinnedMesh, SkinnedMeshInverseBindposes},
|
|
Indices, PrimitiveTopology,
|
|
},
|
|
};
|
|
use rand::Rng;
|
|
|
|
fn main() {
|
|
App::new()
|
|
.add_plugins(DefaultPlugins)
|
|
.insert_resource(AmbientLight {
|
|
brightness: 1.0,
|
|
..default()
|
|
})
|
|
.add_startup_system(setup)
|
|
.add_system(joint_animation)
|
|
.run();
|
|
}
|
|
|
|
/// Used to mark a joint to be animated in the [`joint_animation`] system.
|
|
#[derive(Component)]
|
|
struct AnimatedJoint;
|
|
|
|
/// Construct a mesh and a skeleton with 2 joints for that mesh,
|
|
/// and mark the second joint to be animated.
|
|
/// It is similar to the scene defined in `models/SimpleSkin/SimpleSkin.gltf`
|
|
fn setup(
|
|
mut commands: Commands,
|
|
mut meshes: ResMut<Assets<Mesh>>,
|
|
mut materials: ResMut<Assets<StandardMaterial>>,
|
|
mut skinned_mesh_inverse_bindposes_assets: ResMut<Assets<SkinnedMeshInverseBindposes>>,
|
|
) {
|
|
// Create a camera
|
|
commands.spawn(Camera3dBundle {
|
|
transform: Transform::from_xyz(-2.0, 2.5, 5.0).looking_at(Vec3::ZERO, Vec3::Y),
|
|
..default()
|
|
});
|
|
|
|
// Create inverse bindpose matrices for a skeleton consists of 2 joints
|
|
let inverse_bindposes =
|
|
skinned_mesh_inverse_bindposes_assets.add(SkinnedMeshInverseBindposes::from(vec![
|
|
Mat4::from_translation(Vec3::new(-0.5, -1.0, 0.0)),
|
|
Mat4::from_translation(Vec3::new(-0.5, -1.0, 0.0)),
|
|
]));
|
|
|
|
// Create a mesh
|
|
let mut mesh = Mesh::new(PrimitiveTopology::TriangleList);
|
|
// Set mesh vertex positions
|
|
mesh.insert_attribute(
|
|
Mesh::ATTRIBUTE_POSITION,
|
|
vec![
|
|
[0.0, 0.0, 0.0],
|
|
[1.0, 0.0, 0.0],
|
|
[0.0, 0.5, 0.0],
|
|
[1.0, 0.5, 0.0],
|
|
[0.0, 1.0, 0.0],
|
|
[1.0, 1.0, 0.0],
|
|
[0.0, 1.5, 0.0],
|
|
[1.0, 1.5, 0.0],
|
|
[0.0, 2.0, 0.0],
|
|
[1.0, 2.0, 0.0],
|
|
],
|
|
);
|
|
// Set mesh vertex normals
|
|
mesh.insert_attribute(Mesh::ATTRIBUTE_NORMAL, vec![[0.0, 0.0, 1.0]; 10]);
|
|
// Set mesh vertex UVs. Although the mesh doesn't have any texture applied,
|
|
// UVs are still required by the render pipeline. So these UVs are zeroed out.
|
|
mesh.insert_attribute(Mesh::ATTRIBUTE_UV_0, vec![[0.0, 0.0]; 10]);
|
|
// Set mesh vertex joint indices for mesh skinning.
|
|
// Each vertex gets 4 indices used to address the `JointTransforms` array in the vertex shader
|
|
// as well as `SkinnedMeshJoint` array in the `SkinnedMesh` component.
|
|
// This means that a maximum of 4 joints can affect a single vertex.
|
|
mesh.insert_attribute(
|
|
Mesh::ATTRIBUTE_JOINT_INDEX,
|
|
vec![
|
|
[0u16, 0, 0, 0],
|
|
[0, 0, 0, 0],
|
|
[0, 1, 0, 0],
|
|
[0, 1, 0, 0],
|
|
[0, 1, 0, 0],
|
|
[0, 1, 0, 0],
|
|
[0, 1, 0, 0],
|
|
[0, 1, 0, 0],
|
|
[0, 1, 0, 0],
|
|
[0, 1, 0, 0],
|
|
],
|
|
);
|
|
// Set mesh vertex joint weights for mesh skinning.
|
|
// Each vertex gets 4 joint weights corresponding to the 4 joint indices assigned to it.
|
|
// The sum of these weights should equal to 1.
|
|
mesh.insert_attribute(
|
|
Mesh::ATTRIBUTE_JOINT_WEIGHT,
|
|
vec![
|
|
[1.00, 0.00, 0.0, 0.0],
|
|
[1.00, 0.00, 0.0, 0.0],
|
|
[0.75, 0.25, 0.0, 0.0],
|
|
[0.75, 0.25, 0.0, 0.0],
|
|
[0.50, 0.50, 0.0, 0.0],
|
|
[0.50, 0.50, 0.0, 0.0],
|
|
[0.25, 0.75, 0.0, 0.0],
|
|
[0.25, 0.75, 0.0, 0.0],
|
|
[0.00, 1.00, 0.0, 0.0],
|
|
[0.00, 1.00, 0.0, 0.0],
|
|
],
|
|
);
|
|
// Tell bevy to construct triangles from a list of vertex indices,
|
|
// where each 3 vertex indices form an triangle.
|
|
mesh.set_indices(Some(Indices::U16(vec![
|
|
0, 1, 3, 0, 3, 2, 2, 3, 5, 2, 5, 4, 4, 5, 7, 4, 7, 6, 6, 7, 9, 6, 9, 8,
|
|
])));
|
|
|
|
let mesh = meshes.add(mesh);
|
|
for i in -5..5 {
|
|
// Create joint entities
|
|
let joint_0 = commands
|
|
.spawn((
|
|
Transform::from_xyz(i as f32 * 1.5, 0.0, 0.0),
|
|
GlobalTransform::IDENTITY,
|
|
))
|
|
.id();
|
|
let joint_1 = commands
|
|
.spawn((
|
|
AnimatedJoint,
|
|
Transform::IDENTITY,
|
|
GlobalTransform::IDENTITY,
|
|
))
|
|
.id();
|
|
|
|
// Set joint_1 as a child of joint_0.
|
|
commands.entity(joint_0).push_children(&[joint_1]);
|
|
|
|
// Each joint in this vector corresponds to each inverse bindpose matrix in `SkinnedMeshInverseBindposes`.
|
|
let joint_entities = vec![joint_0, joint_1];
|
|
|
|
// Create skinned mesh renderer. Note that its transform doesn't affect the position of the mesh.
|
|
commands.spawn((
|
|
PbrBundle {
|
|
mesh: mesh.clone(),
|
|
material: materials.add(
|
|
Color::rgb(
|
|
rand::thread_rng().gen_range(0.0..1.0),
|
|
rand::thread_rng().gen_range(0.0..1.0),
|
|
rand::thread_rng().gen_range(0.0..1.0),
|
|
)
|
|
.into(),
|
|
),
|
|
..default()
|
|
},
|
|
SkinnedMesh {
|
|
inverse_bindposes: inverse_bindposes.clone(),
|
|
joints: joint_entities,
|
|
},
|
|
));
|
|
}
|
|
}
|
|
|
|
/// Animate the joint marked with [`AnimatedJoint`] component.
|
|
fn joint_animation(time: Res<Time>, mut query: Query<&mut Transform, With<AnimatedJoint>>) {
|
|
for mut transform in &mut query {
|
|
transform.rotation =
|
|
Quat::from_rotation_z(PI / 2. * time.time_since_startup().as_secs_f32().sin());
|
|
}
|
|
}
|