
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
#define_import_path bevy_pbr::mesh_view_bindings
|
|
|
|
|
|

improve shader import model (#5703)
# Objective
operate on naga IR directly to improve handling of shader modules.
- give codespan reporting into imported modules
- allow glsl to be used from wgsl and vice-versa
the ultimate objective is to make it possible to
- provide user hooks for core shader functions (to modify light
behaviour within the standard pbr pipeline, for example)
- make automatic binding slot allocation possible
but ... since this is already big, adds some value and (i think) is at
feature parity with the existing code, i wanted to push this now.
## Solution
i made a crate called naga_oil (https://github.com/robtfm/naga_oil -
unpublished for now, could be part of bevy) which manages modules by
- building each module independantly to naga IR
- creating "header" files for each supported language, which are used to
build dependent modules/shaders
- make final shaders by combining the shader IR with the IR for imported
modules
then integrated this into bevy, replacing some of the existing shader
processing stuff. also reworked examples to reflect this.
## Migration Guide
shaders that don't use `#import` directives should work without changes.
the most notable user-facing difference is that imported
functions/variables/etc need to be qualified at point of use, and
there's no "leakage" of visible stuff into your shader scope from the
imports of your imports, so if you used things imported by your imports,
you now need to import them directly and qualify them.
the current strategy of including/'spreading' `mesh_vertex_output`
directly into a struct doesn't work any more, so these need to be
modified as per the examples (e.g. color_material.wgsl, or many others).
mesh data is assumed to be in bindgroup 2 by default, if mesh data is
bound into bindgroup 1 instead then the shader def `MESH_BINDGROUP_1`
needs to be added to the pipeline shader_defs.
2023-06-27 00:29:22 +00:00
|
|
|
#import bevy_pbr::mesh_view_types as types
|
2023-10-21 11:51:58 +00:00
|
|
|
#import bevy_render::{
|
|
|
|
|
view::View,
|
|
|
|
|
globals::Globals,
|
|
|
|
|
}
|
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(0) var<uniform> view: View;
|
|
|
|
|
@group(0) @binding(1) var<uniform> lights: types::Lights;
|
2024-02-23 01:24:59 +00:00
|
|
|
#ifdef NO_CUBE_ARRAY_TEXTURES_SUPPORT
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(2) var point_shadow_textures: texture_depth_cube;
|
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
#else
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(2) var point_shadow_textures: texture_depth_cube_array;
|
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
#endif
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(3) var point_shadow_textures_sampler: sampler_comparison;
|
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
#ifdef NO_ARRAY_TEXTURES_SUPPORT
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(4) var directional_shadow_textures: texture_depth_2d;
|
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
#else
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(4) var directional_shadow_textures: texture_depth_2d_array;
|
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
#endif
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(5) var directional_shadow_textures_sampler: sampler_comparison;
|
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
|
2022-11-21 22:38:29 +00:00
|
|
|
#if AVAILABLE_STORAGE_BUFFER_BINDINGS >= 3
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(6) var<storage> point_lights: types::PointLights;
|
|
|
|
|
@group(0) @binding(7) var<storage> cluster_light_index_lists: types::ClusterLightIndexLists;
|
|
|
|
|
@group(0) @binding(8) var<storage> cluster_offsets_and_counts: types::ClusterOffsetsAndCounts;
|
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
#else
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(6) var<uniform> point_lights: types::PointLights;
|
|
|
|
|
@group(0) @binding(7) var<uniform> cluster_light_index_lists: types::ClusterLightIndexLists;
|
|
|
|
|
@group(0) @binding(8) var<uniform> cluster_offsets_and_counts: types::ClusterOffsetsAndCounts;
|
Split mesh shader files (#4867)
# Objective
- Split PBR and 2D mesh shaders into types and bindings to prepare the shaders to be more reusable.
- See #3969 for details. I'm doing this in multiple steps to make review easier.
---
## Changelog
- Changed: 2D and PBR mesh shaders are now split into types and bindings, the following shader imports are available: `bevy_pbr::mesh_view_types`, `bevy_pbr::mesh_view_bindings`, `bevy_pbr::mesh_types`, `bevy_pbr::mesh_bindings`, `bevy_sprite::mesh2d_view_types`, `bevy_sprite::mesh2d_view_bindings`, `bevy_sprite::mesh2d_types`, `bevy_sprite::mesh2d_bindings`
## Migration Guide
- In shaders for 3D meshes:
- `#import bevy_pbr::mesh_view_bind_group` -> `#import bevy_pbr::mesh_view_bindings`
- `#import bevy_pbr::mesh_struct` -> `#import bevy_pbr::mesh_types`
- NOTE: If you are using the mesh bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_pbr::mesh_bindings` which itself imports the mesh types needed for the bindings.
- In shaders for 2D meshes:
- `#import bevy_sprite::mesh2d_view_bind_group` -> `#import bevy_sprite::mesh2d_view_bindings`
- `#import bevy_sprite::mesh2d_struct` -> `#import bevy_sprite::mesh2d_types`
- NOTE: If you are using the mesh2d bind group at bind group index 2, you can remove those binding statements in your shader and just use `#import bevy_sprite::mesh2d_bindings` which itself imports the mesh2d types needed for the bindings.
2022-05-31 23:23:25 +00:00
|
|
|
#endif
|
2022-09-28 04:20:27 +00:00
|
|
|
|
2023-09-19 22:17:44 +00:00
|
|
|
@group(0) @binding(9) var<uniform> globals: Globals;
|
|
|
|
|
@group(0) @binding(10) var<uniform> fog: types::Fog;
|

Implement minimal reflection probes (fixed macOS, iOS, and Android). (#11366)
This pull request re-submits #10057, which was backed out for breaking
macOS, iOS, and Android. I've tested this version on macOS and Android
and on the iOS simulator.
# Objective
This pull request implements *reflection probes*, which generalize
environment maps to allow for multiple environment maps in the same
scene, each of which has an axis-aligned bounding box. This is a
standard feature of physically-based renderers and was inspired by [the
corresponding feature in Blender's Eevee renderer].
## Solution
This is a minimal implementation of reflection probes that allows
artists to define cuboid bounding regions associated with environment
maps. For every view, on every frame, a system builds up a list of the
nearest 4 reflection probes that are within the view's frustum and
supplies that list to the shader. The PBR fragment shader searches
through the list, finds the first containing reflection probe, and uses
it for indirect lighting, falling back to the view's environment map if
none is found. Both forward and deferred renderers are fully supported.
A reflection probe is an entity with a pair of components, *LightProbe*
and *EnvironmentMapLight* (as well as the standard *SpatialBundle*, to
position it in the world). The *LightProbe* component (along with the
*Transform*) defines the bounding region, while the
*EnvironmentMapLight* component specifies the associated diffuse and
specular cubemaps.
A frequent question is "why two components instead of just one?" The
advantages of this setup are:
1. It's readily extensible to other types of light probes, in particular
*irradiance volumes* (also known as ambient cubes or voxel global
illumination), which use the same approach of bounding cuboids. With a
single component that applies to both reflection probes and irradiance
volumes, we can share the logic that implements falloff and blending
between multiple light probes between both of those features.
2. It reduces duplication between the existing *EnvironmentMapLight* and
these new reflection probes. Systems can treat environment maps attached
to cameras the same way they treat environment maps applied to
reflection probes if they wish.
Internally, we gather up all environment maps in the scene and place
them in a cubemap array. At present, this means that all environment
maps must have the same size, mipmap count, and texture format. A
warning is emitted if this restriction is violated. We could potentially
relax this in the future as part of the automatic mipmap generation
work, which could easily do texture format conversion as part of its
preprocessing.
An easy way to generate reflection probe cubemaps is to bake them in
Blender and use the `export-blender-gi` tool that's part of the
[`bevy-baked-gi`] project. This tool takes a `.blend` file containing
baked cubemaps as input and exports cubemap images, pre-filtered with an
embedded fork of the [glTF IBL Sampler], alongside a corresponding
`.scn.ron` file that the scene spawner can use to recreate the
reflection probes.
Note that this is intentionally a minimal implementation, to aid
reviewability. Known issues are:
* Reflection probes are basically unsupported on WebGL 2, because WebGL
2 has no cubemap arrays. (Strictly speaking, you can have precisely one
reflection probe in the scene if you have no other cubemaps anywhere,
but this isn't very useful.)
* Reflection probes have no falloff, so reflections will abruptly change
when objects move from one bounding region to another.
* As mentioned before, all cubemaps in the world of a given type
(diffuse or specular) must have the same size, format, and mipmap count.
Future work includes:
* Blending between multiple reflection probes.
* A falloff/fade-out region so that reflected objects disappear
gradually instead of vanishing all at once.
* Irradiance volumes for voxel-based global illumination. This should
reuse much of the reflection probe logic, as they're both GI techniques
based on cuboid bounding regions.
* Support for WebGL 2, by breaking batches when reflection probes are
used.
These issues notwithstanding, I think it's best to land this with
roughly the current set of functionality, because this patch is useful
as is and adding everything above would make the pull request
significantly larger and harder to review.
---
## Changelog
### Added
* A new *LightProbe* component is available that specifies a bounding
region that an *EnvironmentMapLight* applies to. The combination of a
*LightProbe* and an *EnvironmentMapLight* offers *reflection probe*
functionality similar to that available in other engines.
[the corresponding feature in Blender's Eevee renderer]:
https://docs.blender.org/manual/en/latest/render/eevee/light_probes/reflection_cubemaps.html
[`bevy-baked-gi`]: https://github.com/pcwalton/bevy-baked-gi
[glTF IBL Sampler]: https://github.com/KhronosGroup/glTF-IBL-Sampler
2024-01-19 07:33:52 +00:00
|
|
|
@group(0) @binding(11) var<uniform> light_probes: types::LightProbes;
|
2023-01-19 22:11:13 +00:00
|
|
|
|
2024-05-08 07:34:59 +00:00
|
|
|
const VISIBILITY_RANGE_UNIFORM_BUFFER_SIZE: u32 = 64u;
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
#if AVAILABLE_STORAGE_BUFFER_BINDINGS >= 6
|
|
|
|
|
@group(0) @binding(12) var<storage> visibility_ranges: array<vec4<f32>>;
|
|
|
|
|
#else
|
2024-05-08 07:34:59 +00:00
|
|
|
@group(0) @binding(12) var<uniform> visibility_ranges: array<vec4<f32>, VISIBILITY_RANGE_UNIFORM_BUFFER_SIZE>;
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
#endif
|
|
|
|
|
|
|
|
|
|
@group(0) @binding(13) var screen_space_ambient_occlusion_texture: texture_2d<f32>;
|

Screen Space Ambient Occlusion (SSAO) MVP (#7402)

# Objective
- Add Screen space ambient occlusion (SSAO). SSAO approximates
small-scale, local occlusion of _indirect_ diffuse light between
objects. SSAO does not apply to direct lighting, such as point or
directional lights.
- This darkens creases, e.g. on staircases, and gives nice contact
shadows where objects meet, giving entities a more "grounded" feel.
- Closes https://github.com/bevyengine/bevy/issues/3632.
## Solution
- Implement the GTAO algorithm.
-
https://www.activision.com/cdn/research/Practical_Real_Time_Strategies_for_Accurate_Indirect_Occlusion_NEW%20VERSION_COLOR.pdf
-
https://blog.selfshadow.com/publications/s2016-shading-course/activision/s2016_pbs_activision_occlusion.pdf
- Source code heavily based on [Intel's
XeGTAO](https://github.com/GameTechDev/XeGTAO/blob/0d177ce06bfa642f64d8af4de1197ad1bcb862d4/Source/Rendering/Shaders/XeGTAO.hlsli).
- Add an SSAO bevy example.
## Algorithm Overview
* Run a depth and normal prepass
* Create downscaled mips of the depth texture (preprocess_depths pass)
* GTAO pass - for each pixel, take several random samples from the
depth+normal buffers, reconstruct world position, raytrace in screen
space to estimate occlusion. Rather then doing completely random samples
on a hemisphere, you choose random _slices_ of the hemisphere, and then
can analytically compute the full occlusion of that slice. Also compute
edges based on depth differences here.
* Spatial denoise pass - bilateral blur, using edge detection to not
blur over edges. This is the final SSAO result.
* Main pass - if SSAO exists, sample the SSAO texture, and set occlusion
to be the minimum of ssao/material occlusion. This then feeds into the
rest of the PBR shader as normal.
---
## Future Improvements
- Maybe remove the low quality preset for now (too noisy)
- WebGPU fallback (see below)
- Faster depth->world position (see reverted code)
- Bent normals
- Try interleaved gradient noise or spatiotemporal blue noise
- Replace the spatial denoiser with a combined spatial+temporal denoiser
- Render at half resolution and use a bilateral upsample
- Better multibounce approximation
(https://drive.google.com/file/d/1SyagcEVplIm2KkRD3WQYSO9O0Iyi1hfy/view)
## Far-Future Performance Improvements
- F16 math (missing naga-wgsl support
https://github.com/gfx-rs/naga/issues/1884)
- Faster coordinate space conversion for normals
- Faster depth mipchain creation
(https://github.com/GPUOpen-Effects/FidelityFX-SPD) (wgpu/naga does not
currently support subgroup ops)
- Deinterleaved SSAO for better cache efficiency
(https://developer.nvidia.com/sites/default/files/akamai/gameworks/samples/DeinterleavedTexturing.pdf)
## Other Interesting Papers
- Visibility bitmask
(https://link.springer.com/article/10.1007/s00371-022-02703-y,
https://cdrinmatane.github.io/posts/cgspotlight-slides/)
- Screen space diffuse lighting
(https://github.com/Patapom/GodComplex/blob/master/Tests/TestHBIL/2018%20Mayaux%20-%20Horizon-Based%20Indirect%20Lighting%20(HBIL).pdf)
## Platform Support
* SSAO currently does not work on DirectX12 due to issues with wgpu and
naga:
* https://github.com/gfx-rs/wgpu/pull/3798
* https://github.com/gfx-rs/naga/pull/2353
* SSAO currently does not work on WebGPU because r16float is not a valid
storage texture format
https://gpuweb.github.io/gpuweb/wgsl/#storage-texel-formats. We can fix
this with a fallback to r32float.
---
## Changelog
- Added ScreenSpaceAmbientOcclusionSettings,
ScreenSpaceAmbientOcclusionQualityLevel, and
ScreenSpaceAmbientOcclusionBundle
---------
Co-authored-by: IceSentry <c.giguere42@gmail.com>
Co-authored-by: IceSentry <IceSentry@users.noreply.github.com>
Co-authored-by: Daniel Chia <danstryder@gmail.com>
Co-authored-by: Elabajaba <Elabajaba@users.noreply.github.com>
Co-authored-by: Robert Swain <robert.swain@gmail.com>
Co-authored-by: robtfm <50659922+robtfm@users.noreply.github.com>
Co-authored-by: Brandon Dyer <brandondyer64@gmail.com>
Co-authored-by: Edgar Geier <geieredgar@gmail.com>
Co-authored-by: Nicola Papale <nicopap@users.noreply.github.com>
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2023-06-18 21:05:55 +00:00
|
|
|
|
Implement minimal reflection probes (fixed macOS, iOS, and Android). (#11366)
This pull request re-submits #10057, which was backed out for breaking
macOS, iOS, and Android. I've tested this version on macOS and Android
and on the iOS simulator.
# Objective
This pull request implements *reflection probes*, which generalize
environment maps to allow for multiple environment maps in the same
scene, each of which has an axis-aligned bounding box. This is a
standard feature of physically-based renderers and was inspired by [the
corresponding feature in Blender's Eevee renderer].
## Solution
This is a minimal implementation of reflection probes that allows
artists to define cuboid bounding regions associated with environment
maps. For every view, on every frame, a system builds up a list of the
nearest 4 reflection probes that are within the view's frustum and
supplies that list to the shader. The PBR fragment shader searches
through the list, finds the first containing reflection probe, and uses
it for indirect lighting, falling back to the view's environment map if
none is found. Both forward and deferred renderers are fully supported.
A reflection probe is an entity with a pair of components, *LightProbe*
and *EnvironmentMapLight* (as well as the standard *SpatialBundle*, to
position it in the world). The *LightProbe* component (along with the
*Transform*) defines the bounding region, while the
*EnvironmentMapLight* component specifies the associated diffuse and
specular cubemaps.
A frequent question is "why two components instead of just one?" The
advantages of this setup are:
1. It's readily extensible to other types of light probes, in particular
*irradiance volumes* (also known as ambient cubes or voxel global
illumination), which use the same approach of bounding cuboids. With a
single component that applies to both reflection probes and irradiance
volumes, we can share the logic that implements falloff and blending
between multiple light probes between both of those features.
2. It reduces duplication between the existing *EnvironmentMapLight* and
these new reflection probes. Systems can treat environment maps attached
to cameras the same way they treat environment maps applied to
reflection probes if they wish.
Internally, we gather up all environment maps in the scene and place
them in a cubemap array. At present, this means that all environment
maps must have the same size, mipmap count, and texture format. A
warning is emitted if this restriction is violated. We could potentially
relax this in the future as part of the automatic mipmap generation
work, which could easily do texture format conversion as part of its
preprocessing.
An easy way to generate reflection probe cubemaps is to bake them in
Blender and use the `export-blender-gi` tool that's part of the
[`bevy-baked-gi`] project. This tool takes a `.blend` file containing
baked cubemaps as input and exports cubemap images, pre-filtered with an
embedded fork of the [glTF IBL Sampler], alongside a corresponding
`.scn.ron` file that the scene spawner can use to recreate the
reflection probes.
Note that this is intentionally a minimal implementation, to aid
reviewability. Known issues are:
* Reflection probes are basically unsupported on WebGL 2, because WebGL
2 has no cubemap arrays. (Strictly speaking, you can have precisely one
reflection probe in the scene if you have no other cubemaps anywhere,
but this isn't very useful.)
* Reflection probes have no falloff, so reflections will abruptly change
when objects move from one bounding region to another.
* As mentioned before, all cubemaps in the world of a given type
(diffuse or specular) must have the same size, format, and mipmap count.
Future work includes:
* Blending between multiple reflection probes.
* A falloff/fade-out region so that reflected objects disappear
gradually instead of vanishing all at once.
* Irradiance volumes for voxel-based global illumination. This should
reuse much of the reflection probe logic, as they're both GI techniques
based on cuboid bounding regions.
* Support for WebGL 2, by breaking batches when reflection probes are
used.
These issues notwithstanding, I think it's best to land this with
roughly the current set of functionality, because this patch is useful
as is and adding everything above would make the pull request
significantly larger and harder to review.
---
## Changelog
### Added
* A new *LightProbe* component is available that specifies a bounding
region that an *EnvironmentMapLight* applies to. The combination of a
*LightProbe* and an *EnvironmentMapLight* offers *reflection probe*
functionality similar to that available in other engines.
[the corresponding feature in Blender's Eevee renderer]:
https://docs.blender.org/manual/en/latest/render/eevee/light_probes/reflection_cubemaps.html
[`bevy-baked-gi`]: https://github.com/pcwalton/bevy-baked-gi
[glTF IBL Sampler]: https://github.com/KhronosGroup/glTF-IBL-Sampler
2024-01-19 07:33:52 +00:00
|
|
|
#ifdef MULTIPLE_LIGHT_PROBES_IN_ARRAY
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(14) var diffuse_environment_maps: binding_array<texture_cube<f32>, 8u>;
|
|
|
|
|
@group(0) @binding(15) var specular_environment_maps: binding_array<texture_cube<f32>, 8u>;
|
Implement minimal reflection probes (fixed macOS, iOS, and Android). (#11366)
This pull request re-submits #10057, which was backed out for breaking
macOS, iOS, and Android. I've tested this version on macOS and Android
and on the iOS simulator.
# Objective
This pull request implements *reflection probes*, which generalize
environment maps to allow for multiple environment maps in the same
scene, each of which has an axis-aligned bounding box. This is a
standard feature of physically-based renderers and was inspired by [the
corresponding feature in Blender's Eevee renderer].
## Solution
This is a minimal implementation of reflection probes that allows
artists to define cuboid bounding regions associated with environment
maps. For every view, on every frame, a system builds up a list of the
nearest 4 reflection probes that are within the view's frustum and
supplies that list to the shader. The PBR fragment shader searches
through the list, finds the first containing reflection probe, and uses
it for indirect lighting, falling back to the view's environment map if
none is found. Both forward and deferred renderers are fully supported.
A reflection probe is an entity with a pair of components, *LightProbe*
and *EnvironmentMapLight* (as well as the standard *SpatialBundle*, to
position it in the world). The *LightProbe* component (along with the
*Transform*) defines the bounding region, while the
*EnvironmentMapLight* component specifies the associated diffuse and
specular cubemaps.
A frequent question is "why two components instead of just one?" The
advantages of this setup are:
1. It's readily extensible to other types of light probes, in particular
*irradiance volumes* (also known as ambient cubes or voxel global
illumination), which use the same approach of bounding cuboids. With a
single component that applies to both reflection probes and irradiance
volumes, we can share the logic that implements falloff and blending
between multiple light probes between both of those features.
2. It reduces duplication between the existing *EnvironmentMapLight* and
these new reflection probes. Systems can treat environment maps attached
to cameras the same way they treat environment maps applied to
reflection probes if they wish.
Internally, we gather up all environment maps in the scene and place
them in a cubemap array. At present, this means that all environment
maps must have the same size, mipmap count, and texture format. A
warning is emitted if this restriction is violated. We could potentially
relax this in the future as part of the automatic mipmap generation
work, which could easily do texture format conversion as part of its
preprocessing.
An easy way to generate reflection probe cubemaps is to bake them in
Blender and use the `export-blender-gi` tool that's part of the
[`bevy-baked-gi`] project. This tool takes a `.blend` file containing
baked cubemaps as input and exports cubemap images, pre-filtered with an
embedded fork of the [glTF IBL Sampler], alongside a corresponding
`.scn.ron` file that the scene spawner can use to recreate the
reflection probes.
Note that this is intentionally a minimal implementation, to aid
reviewability. Known issues are:
* Reflection probes are basically unsupported on WebGL 2, because WebGL
2 has no cubemap arrays. (Strictly speaking, you can have precisely one
reflection probe in the scene if you have no other cubemaps anywhere,
but this isn't very useful.)
* Reflection probes have no falloff, so reflections will abruptly change
when objects move from one bounding region to another.
* As mentioned before, all cubemaps in the world of a given type
(diffuse or specular) must have the same size, format, and mipmap count.
Future work includes:
* Blending between multiple reflection probes.
* A falloff/fade-out region so that reflected objects disappear
gradually instead of vanishing all at once.
* Irradiance volumes for voxel-based global illumination. This should
reuse much of the reflection probe logic, as they're both GI techniques
based on cuboid bounding regions.
* Support for WebGL 2, by breaking batches when reflection probes are
used.
These issues notwithstanding, I think it's best to land this with
roughly the current set of functionality, because this patch is useful
as is and adding everything above would make the pull request
significantly larger and harder to review.
---
## Changelog
### Added
* A new *LightProbe* component is available that specifies a bounding
region that an *EnvironmentMapLight* applies to. The combination of a
*LightProbe* and an *EnvironmentMapLight* offers *reflection probe*
functionality similar to that available in other engines.
[the corresponding feature in Blender's Eevee renderer]:
https://docs.blender.org/manual/en/latest/render/eevee/light_probes/reflection_cubemaps.html
[`bevy-baked-gi`]: https://github.com/pcwalton/bevy-baked-gi
[glTF IBL Sampler]: https://github.com/KhronosGroup/glTF-IBL-Sampler
2024-01-19 07:33:52 +00:00
|
|
|
#else
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(14) var diffuse_environment_map: texture_cube<f32>;
|
|
|
|
|
@group(0) @binding(15) var specular_environment_map: texture_cube<f32>;
|
Implement minimal reflection probes (fixed macOS, iOS, and Android). (#11366)
This pull request re-submits #10057, which was backed out for breaking
macOS, iOS, and Android. I've tested this version on macOS and Android
and on the iOS simulator.
# Objective
This pull request implements *reflection probes*, which generalize
environment maps to allow for multiple environment maps in the same
scene, each of which has an axis-aligned bounding box. This is a
standard feature of physically-based renderers and was inspired by [the
corresponding feature in Blender's Eevee renderer].
## Solution
This is a minimal implementation of reflection probes that allows
artists to define cuboid bounding regions associated with environment
maps. For every view, on every frame, a system builds up a list of the
nearest 4 reflection probes that are within the view's frustum and
supplies that list to the shader. The PBR fragment shader searches
through the list, finds the first containing reflection probe, and uses
it for indirect lighting, falling back to the view's environment map if
none is found. Both forward and deferred renderers are fully supported.
A reflection probe is an entity with a pair of components, *LightProbe*
and *EnvironmentMapLight* (as well as the standard *SpatialBundle*, to
position it in the world). The *LightProbe* component (along with the
*Transform*) defines the bounding region, while the
*EnvironmentMapLight* component specifies the associated diffuse and
specular cubemaps.
A frequent question is "why two components instead of just one?" The
advantages of this setup are:
1. It's readily extensible to other types of light probes, in particular
*irradiance volumes* (also known as ambient cubes or voxel global
illumination), which use the same approach of bounding cuboids. With a
single component that applies to both reflection probes and irradiance
volumes, we can share the logic that implements falloff and blending
between multiple light probes between both of those features.
2. It reduces duplication between the existing *EnvironmentMapLight* and
these new reflection probes. Systems can treat environment maps attached
to cameras the same way they treat environment maps applied to
reflection probes if they wish.
Internally, we gather up all environment maps in the scene and place
them in a cubemap array. At present, this means that all environment
maps must have the same size, mipmap count, and texture format. A
warning is emitted if this restriction is violated. We could potentially
relax this in the future as part of the automatic mipmap generation
work, which could easily do texture format conversion as part of its
preprocessing.
An easy way to generate reflection probe cubemaps is to bake them in
Blender and use the `export-blender-gi` tool that's part of the
[`bevy-baked-gi`] project. This tool takes a `.blend` file containing
baked cubemaps as input and exports cubemap images, pre-filtered with an
embedded fork of the [glTF IBL Sampler], alongside a corresponding
`.scn.ron` file that the scene spawner can use to recreate the
reflection probes.
Note that this is intentionally a minimal implementation, to aid
reviewability. Known issues are:
* Reflection probes are basically unsupported on WebGL 2, because WebGL
2 has no cubemap arrays. (Strictly speaking, you can have precisely one
reflection probe in the scene if you have no other cubemaps anywhere,
but this isn't very useful.)
* Reflection probes have no falloff, so reflections will abruptly change
when objects move from one bounding region to another.
* As mentioned before, all cubemaps in the world of a given type
(diffuse or specular) must have the same size, format, and mipmap count.
Future work includes:
* Blending between multiple reflection probes.
* A falloff/fade-out region so that reflected objects disappear
gradually instead of vanishing all at once.
* Irradiance volumes for voxel-based global illumination. This should
reuse much of the reflection probe logic, as they're both GI techniques
based on cuboid bounding regions.
* Support for WebGL 2, by breaking batches when reflection probes are
used.
These issues notwithstanding, I think it's best to land this with
roughly the current set of functionality, because this patch is useful
as is and adding everything above would make the pull request
significantly larger and harder to review.
---
## Changelog
### Added
* A new *LightProbe* component is available that specifies a bounding
region that an *EnvironmentMapLight* applies to. The combination of a
*LightProbe* and an *EnvironmentMapLight* offers *reflection probe*
functionality similar to that available in other engines.
[the corresponding feature in Blender's Eevee renderer]:
https://docs.blender.org/manual/en/latest/render/eevee/light_probes/reflection_cubemaps.html
[`bevy-baked-gi`]: https://github.com/pcwalton/bevy-baked-gi
[glTF IBL Sampler]: https://github.com/KhronosGroup/glTF-IBL-Sampler
2024-01-19 07:33:52 +00:00
|
|
|
#endif
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(16) var environment_map_sampler: sampler;
|
EnvironmentMapLight, BRDF Improvements (#7051)
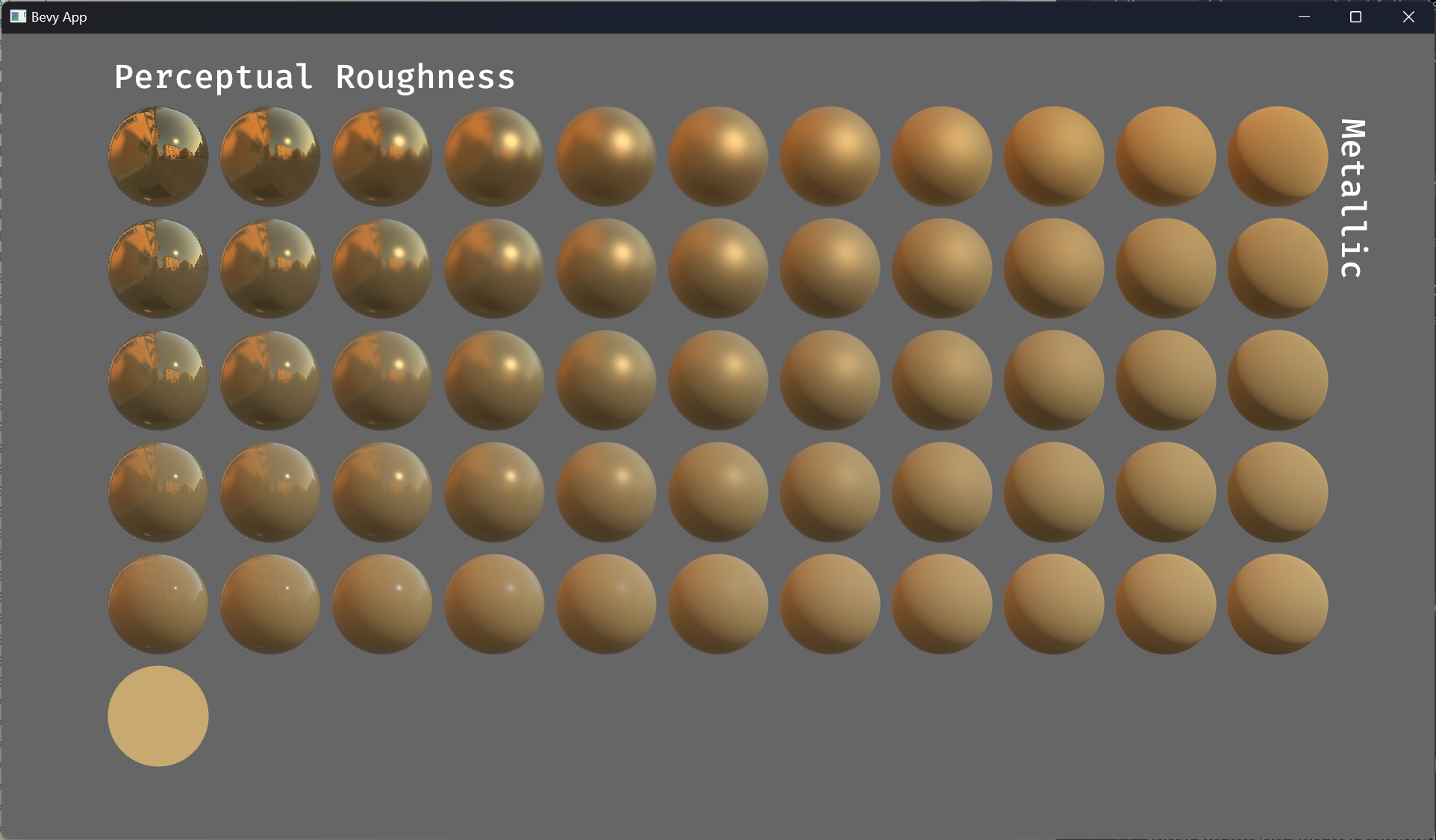
(Before)
(After)
# Objective
- Improve lighting; especially reflections.
- Closes https://github.com/bevyengine/bevy/issues/4581.
## Solution
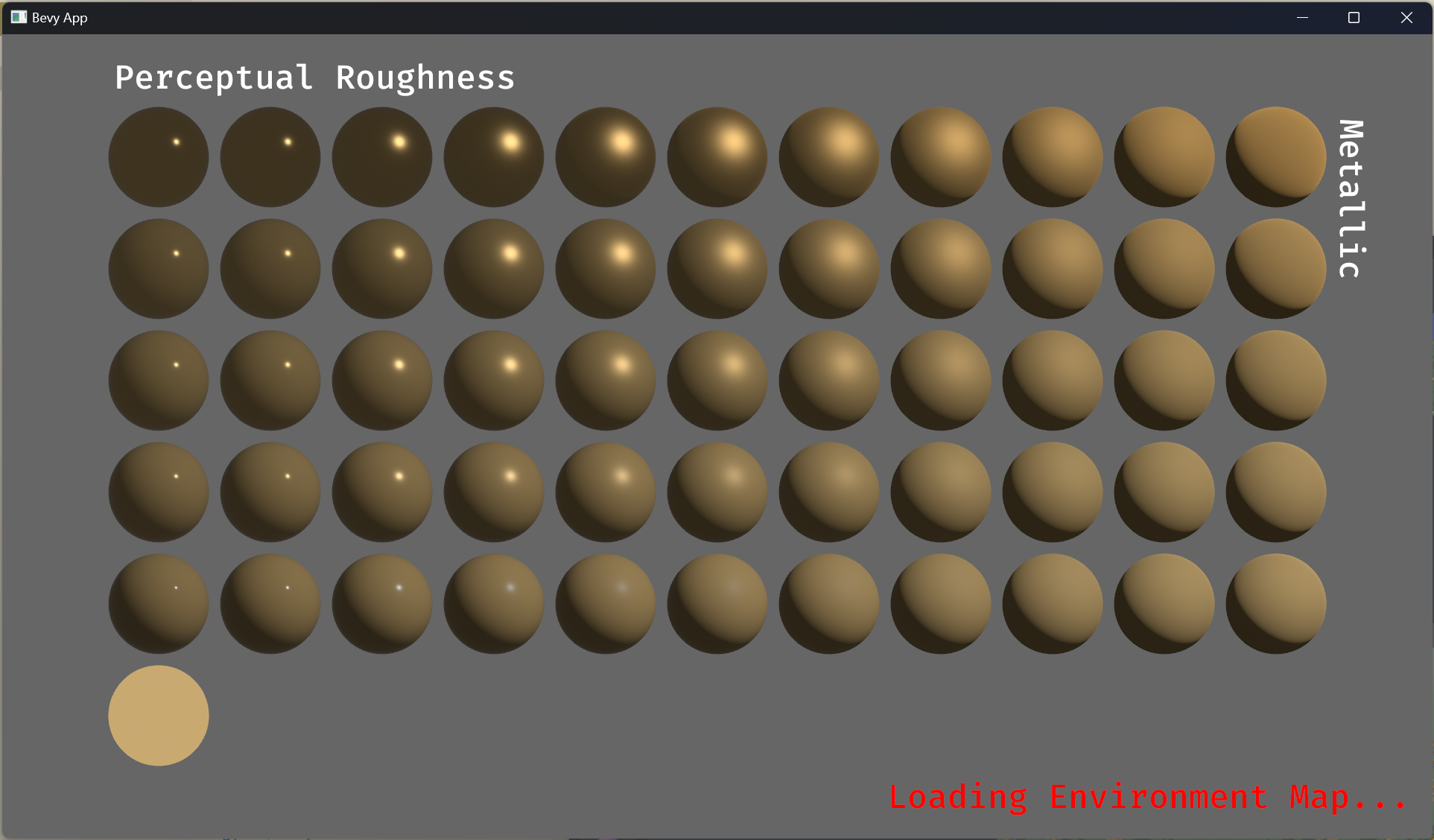
- Implement environment maps, providing better ambient light.
- Add microfacet multibounce approximation for specular highlights from Filament.
- Occlusion is no longer incorrectly applied to direct lighting. It now only applies to diffuse indirect light. Unsure if it's also supposed to apply to specular indirect light - the glTF specification just says "indirect light". In the case of ambient occlusion, for instance, that's usually only calculated as diffuse though. For now, I'm choosing to apply this just to indirect diffuse light, and not specular.
- Modified the PBR example to use an environment map, and have labels.
- Added `FallbackImageCubemap`.
## Implementation
- IBL technique references can be found in environment_map.wgsl.
- It's more accurate to use a LUT for the scale/bias. Filament has a good reference on generating this LUT. For now, I just used an analytic approximation.
- For now, environment maps must first be prefiltered outside of bevy using a 3rd party tool. See the `EnvironmentMap` documentation.
- Eventually, we should have our own prefiltering code, so that we can have dynamically changing environment maps, as well as let users drop in an HDR image and use asset preprocessing to create the needed textures using only bevy.
---
## Changelog
- Added an `EnvironmentMapLight` camera component that adds additional ambient light to a scene.
- StandardMaterials will now appear brighter and more saturated at high roughness, due to internal material changes. This is more physically correct.
- Fixed StandardMaterial occlusion being incorrectly applied to direct lighting.
- Added `FallbackImageCubemap`.
Co-authored-by: IceSentry <c.giguere42@gmail.com>
Co-authored-by: James Liu <contact@jamessliu.com>
Co-authored-by: Rob Parrett <robparrett@gmail.com>
2023-02-09 16:46:32 +00:00
|
|
|
|
2024-02-17 01:49:46 +00:00
|
|
|
#ifdef IRRADIANCE_VOLUMES_ARE_USABLE
|
Implement irradiance volumes. (#10268)
# Objective
Bevy could benefit from *irradiance volumes*, also known as *voxel
global illumination* or simply as light probes (though this term is not
preferred, as multiple techniques can be called light probes).
Irradiance volumes are a form of baked global illumination; they work by
sampling the light at the centers of each voxel within a cuboid. At
runtime, the voxels surrounding the fragment center are sampled and
interpolated to produce indirect diffuse illumination.
## Solution
This is divided into two sections. The first is copied and pasted from
the irradiance volume module documentation and describes the technique.
The second part consists of notes on the implementation.
### Overview
An *irradiance volume* is a cuboid voxel region consisting of
regularly-spaced precomputed samples of diffuse indirect light. They're
ideal if you have a dynamic object such as a character that can move
about
static non-moving geometry such as a level in a game, and you want that
dynamic object to be affected by the light bouncing off that static
geometry.
To use irradiance volumes, you need to precompute, or *bake*, the
indirect
light in your scene. Bevy doesn't currently come with a way to do this.
Fortunately, [Blender] provides a [baking tool] as part of the Eevee
renderer, and its irradiance volumes are compatible with those used by
Bevy.
The [`bevy-baked-gi`] project provides a tool, `export-blender-gi`, that
can
extract the baked irradiance volumes from the Blender `.blend` file and
package them up into a `.ktx2` texture for use by the engine. See the
documentation in the `bevy-baked-gi` project for more details as to this
workflow.
Like all light probes in Bevy, irradiance volumes are 1×1×1 cubes that
can
be arbitrarily scaled, rotated, and positioned in a scene with the
[`bevy_transform::components::Transform`] component. The 3D voxel grid
will
be stretched to fill the interior of the cube, and the illumination from
the
irradiance volume will apply to all fragments within that bounding
region.
Bevy's irradiance volumes are based on Valve's [*ambient cubes*] as used
in
*Half-Life 2* ([Mitchell 2006], slide 27). These encode a single color
of
light from the six 3D cardinal directions and blend the sides together
according to the surface normal.
The primary reason for choosing ambient cubes is to match Blender, so
that
its Eevee renderer can be used for baking. However, they also have some
advantages over the common second-order spherical harmonics approach:
ambient cubes don't suffer from ringing artifacts, they are smaller (6
colors for ambient cubes as opposed to 9 for spherical harmonics), and
evaluation is faster. A smaller basis allows for a denser grid of voxels
with the same storage requirements.
If you wish to use a tool other than `export-blender-gi` to produce the
irradiance volumes, you'll need to pack the irradiance volumes in the
following format. The irradiance volume of resolution *(Rx, Ry, Rz)* is
expected to be a 3D texture of dimensions *(Rx, 2Ry, 3Rz)*. The
unnormalized
texture coordinate *(s, t, p)* of the voxel at coordinate *(x, y, z)*
with
side *S* ∈ *{-X, +X, -Y, +Y, -Z, +Z}* is as follows:
```text
s = x
t = y + ⎰ 0 if S ∈ {-X, -Y, -Z}
⎱ Ry if S ∈ {+X, +Y, +Z}
⎧ 0 if S ∈ {-X, +X}
p = z + ⎨ Rz if S ∈ {-Y, +Y}
⎩ 2Rz if S ∈ {-Z, +Z}
```
Visually, in a left-handed coordinate system with Y up, viewed from the
right, the 3D texture looks like a stacked series of voxel grids, one
for
each cube side, in this order:
| **+X** | **+Y** | **+Z** |
| ------ | ------ | ------ |
| **-X** | **-Y** | **-Z** |
A terminology note: Other engines may refer to irradiance volumes as
*voxel
global illumination*, *VXGI*, or simply as *light probes*. Sometimes
*light
probe* refers to what Bevy calls a reflection probe. In Bevy, *light
probe*
is a generic term that encompasses all cuboid bounding regions that
capture
indirect illumination, whether based on voxels or not.
Note that, if binding arrays aren't supported (e.g. on WebGPU or WebGL
2),
then only the closest irradiance volume to the view will be taken into
account during rendering.
[*ambient cubes*]:
https://advances.realtimerendering.com/s2006/Mitchell-ShadingInValvesSourceEngine.pdf
[Mitchell 2006]:
https://advances.realtimerendering.com/s2006/Mitchell-ShadingInValvesSourceEngine.pdf
[Blender]: http://blender.org/
[baking tool]:
https://docs.blender.org/manual/en/latest/render/eevee/render_settings/indirect_lighting.html
[`bevy-baked-gi`]: https://github.com/pcwalton/bevy-baked-gi
### Implementation notes
This patch generalizes light probes so as to reuse as much code as
possible between irradiance volumes and the existing reflection probes.
This approach was chosen because both techniques share numerous
similarities:
1. Both irradiance volumes and reflection probes are cuboid bounding
regions.
2. Both are responsible for providing baked indirect light.
3. Both techniques involve presenting a variable number of textures to
the shader from which indirect light is sampled. (In the current
implementation, this uses binding arrays.)
4. Both irradiance volumes and reflection probes require gathering and
sorting probes by distance on CPU.
5. Both techniques require the GPU to search through a list of bounding
regions.
6. Both will eventually want to have falloff so that we can smoothly
blend as objects enter and exit the probes' influence ranges. (This is
not implemented yet to keep this patch relatively small and reviewable.)
To do this, we generalize most of the methods in the reflection probes
patch #11366 to be generic over a trait, `LightProbeComponent`. This
trait is implemented by both `EnvironmentMapLight` (for reflection
probes) and `IrradianceVolume` (for irradiance volumes). Using a trait
will allow us to add more types of light probes in the future. In
particular, I highly suspect we will want real-time reflection planes
for mirrors in the future, which can be easily slotted into this
framework.
## Changelog
> This section is optional. If this was a trivial fix, or has no
externally-visible impact, you can delete this section.
### Added
* A new `IrradianceVolume` asset type is available for baked voxelized
light probes. You can bake the global illumination using Blender or
another tool of your choice and use it in Bevy to apply indirect
illumination to dynamic objects.
2024-02-06 23:23:20 +00:00
|
|
|
#ifdef MULTIPLE_LIGHT_PROBES_IN_ARRAY
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(17) var irradiance_volumes: binding_array<texture_3d<f32>, 8u>;
|
Implement irradiance volumes. (#10268)
# Objective
Bevy could benefit from *irradiance volumes*, also known as *voxel
global illumination* or simply as light probes (though this term is not
preferred, as multiple techniques can be called light probes).
Irradiance volumes are a form of baked global illumination; they work by
sampling the light at the centers of each voxel within a cuboid. At
runtime, the voxels surrounding the fragment center are sampled and
interpolated to produce indirect diffuse illumination.
## Solution
This is divided into two sections. The first is copied and pasted from
the irradiance volume module documentation and describes the technique.
The second part consists of notes on the implementation.
### Overview
An *irradiance volume* is a cuboid voxel region consisting of
regularly-spaced precomputed samples of diffuse indirect light. They're
ideal if you have a dynamic object such as a character that can move
about
static non-moving geometry such as a level in a game, and you want that
dynamic object to be affected by the light bouncing off that static
geometry.
To use irradiance volumes, you need to precompute, or *bake*, the
indirect
light in your scene. Bevy doesn't currently come with a way to do this.
Fortunately, [Blender] provides a [baking tool] as part of the Eevee
renderer, and its irradiance volumes are compatible with those used by
Bevy.
The [`bevy-baked-gi`] project provides a tool, `export-blender-gi`, that
can
extract the baked irradiance volumes from the Blender `.blend` file and
package them up into a `.ktx2` texture for use by the engine. See the
documentation in the `bevy-baked-gi` project for more details as to this
workflow.
Like all light probes in Bevy, irradiance volumes are 1×1×1 cubes that
can
be arbitrarily scaled, rotated, and positioned in a scene with the
[`bevy_transform::components::Transform`] component. The 3D voxel grid
will
be stretched to fill the interior of the cube, and the illumination from
the
irradiance volume will apply to all fragments within that bounding
region.
Bevy's irradiance volumes are based on Valve's [*ambient cubes*] as used
in
*Half-Life 2* ([Mitchell 2006], slide 27). These encode a single color
of
light from the six 3D cardinal directions and blend the sides together
according to the surface normal.
The primary reason for choosing ambient cubes is to match Blender, so
that
its Eevee renderer can be used for baking. However, they also have some
advantages over the common second-order spherical harmonics approach:
ambient cubes don't suffer from ringing artifacts, they are smaller (6
colors for ambient cubes as opposed to 9 for spherical harmonics), and
evaluation is faster. A smaller basis allows for a denser grid of voxels
with the same storage requirements.
If you wish to use a tool other than `export-blender-gi` to produce the
irradiance volumes, you'll need to pack the irradiance volumes in the
following format. The irradiance volume of resolution *(Rx, Ry, Rz)* is
expected to be a 3D texture of dimensions *(Rx, 2Ry, 3Rz)*. The
unnormalized
texture coordinate *(s, t, p)* of the voxel at coordinate *(x, y, z)*
with
side *S* ∈ *{-X, +X, -Y, +Y, -Z, +Z}* is as follows:
```text
s = x
t = y + ⎰ 0 if S ∈ {-X, -Y, -Z}
⎱ Ry if S ∈ {+X, +Y, +Z}
⎧ 0 if S ∈ {-X, +X}
p = z + ⎨ Rz if S ∈ {-Y, +Y}
⎩ 2Rz if S ∈ {-Z, +Z}
```
Visually, in a left-handed coordinate system with Y up, viewed from the
right, the 3D texture looks like a stacked series of voxel grids, one
for
each cube side, in this order:
| **+X** | **+Y** | **+Z** |
| ------ | ------ | ------ |
| **-X** | **-Y** | **-Z** |
A terminology note: Other engines may refer to irradiance volumes as
*voxel
global illumination*, *VXGI*, or simply as *light probes*. Sometimes
*light
probe* refers to what Bevy calls a reflection probe. In Bevy, *light
probe*
is a generic term that encompasses all cuboid bounding regions that
capture
indirect illumination, whether based on voxels or not.
Note that, if binding arrays aren't supported (e.g. on WebGPU or WebGL
2),
then only the closest irradiance volume to the view will be taken into
account during rendering.
[*ambient cubes*]:
https://advances.realtimerendering.com/s2006/Mitchell-ShadingInValvesSourceEngine.pdf
[Mitchell 2006]:
https://advances.realtimerendering.com/s2006/Mitchell-ShadingInValvesSourceEngine.pdf
[Blender]: http://blender.org/
[baking tool]:
https://docs.blender.org/manual/en/latest/render/eevee/render_settings/indirect_lighting.html
[`bevy-baked-gi`]: https://github.com/pcwalton/bevy-baked-gi
### Implementation notes
This patch generalizes light probes so as to reuse as much code as
possible between irradiance volumes and the existing reflection probes.
This approach was chosen because both techniques share numerous
similarities:
1. Both irradiance volumes and reflection probes are cuboid bounding
regions.
2. Both are responsible for providing baked indirect light.
3. Both techniques involve presenting a variable number of textures to
the shader from which indirect light is sampled. (In the current
implementation, this uses binding arrays.)
4. Both irradiance volumes and reflection probes require gathering and
sorting probes by distance on CPU.
5. Both techniques require the GPU to search through a list of bounding
regions.
6. Both will eventually want to have falloff so that we can smoothly
blend as objects enter and exit the probes' influence ranges. (This is
not implemented yet to keep this patch relatively small and reviewable.)
To do this, we generalize most of the methods in the reflection probes
patch #11366 to be generic over a trait, `LightProbeComponent`. This
trait is implemented by both `EnvironmentMapLight` (for reflection
probes) and `IrradianceVolume` (for irradiance volumes). Using a trait
will allow us to add more types of light probes in the future. In
particular, I highly suspect we will want real-time reflection planes
for mirrors in the future, which can be easily slotted into this
framework.
## Changelog
> This section is optional. If this was a trivial fix, or has no
externally-visible impact, you can delete this section.
### Added
* A new `IrradianceVolume` asset type is available for baked voxelized
light probes. You can bake the global illumination using Blender or
another tool of your choice and use it in Bevy to apply indirect
illumination to dynamic objects.
2024-02-06 23:23:20 +00:00
|
|
|
#else
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(17) var irradiance_volume: texture_3d<f32>;
|
Implement irradiance volumes. (#10268)
# Objective
Bevy could benefit from *irradiance volumes*, also known as *voxel
global illumination* or simply as light probes (though this term is not
preferred, as multiple techniques can be called light probes).
Irradiance volumes are a form of baked global illumination; they work by
sampling the light at the centers of each voxel within a cuboid. At
runtime, the voxels surrounding the fragment center are sampled and
interpolated to produce indirect diffuse illumination.
## Solution
This is divided into two sections. The first is copied and pasted from
the irradiance volume module documentation and describes the technique.
The second part consists of notes on the implementation.
### Overview
An *irradiance volume* is a cuboid voxel region consisting of
regularly-spaced precomputed samples of diffuse indirect light. They're
ideal if you have a dynamic object such as a character that can move
about
static non-moving geometry such as a level in a game, and you want that
dynamic object to be affected by the light bouncing off that static
geometry.
To use irradiance volumes, you need to precompute, or *bake*, the
indirect
light in your scene. Bevy doesn't currently come with a way to do this.
Fortunately, [Blender] provides a [baking tool] as part of the Eevee
renderer, and its irradiance volumes are compatible with those used by
Bevy.
The [`bevy-baked-gi`] project provides a tool, `export-blender-gi`, that
can
extract the baked irradiance volumes from the Blender `.blend` file and
package them up into a `.ktx2` texture for use by the engine. See the
documentation in the `bevy-baked-gi` project for more details as to this
workflow.
Like all light probes in Bevy, irradiance volumes are 1×1×1 cubes that
can
be arbitrarily scaled, rotated, and positioned in a scene with the
[`bevy_transform::components::Transform`] component. The 3D voxel grid
will
be stretched to fill the interior of the cube, and the illumination from
the
irradiance volume will apply to all fragments within that bounding
region.
Bevy's irradiance volumes are based on Valve's [*ambient cubes*] as used
in
*Half-Life 2* ([Mitchell 2006], slide 27). These encode a single color
of
light from the six 3D cardinal directions and blend the sides together
according to the surface normal.
The primary reason for choosing ambient cubes is to match Blender, so
that
its Eevee renderer can be used for baking. However, they also have some
advantages over the common second-order spherical harmonics approach:
ambient cubes don't suffer from ringing artifacts, they are smaller (6
colors for ambient cubes as opposed to 9 for spherical harmonics), and
evaluation is faster. A smaller basis allows for a denser grid of voxels
with the same storage requirements.
If you wish to use a tool other than `export-blender-gi` to produce the
irradiance volumes, you'll need to pack the irradiance volumes in the
following format. The irradiance volume of resolution *(Rx, Ry, Rz)* is
expected to be a 3D texture of dimensions *(Rx, 2Ry, 3Rz)*. The
unnormalized
texture coordinate *(s, t, p)* of the voxel at coordinate *(x, y, z)*
with
side *S* ∈ *{-X, +X, -Y, +Y, -Z, +Z}* is as follows:
```text
s = x
t = y + ⎰ 0 if S ∈ {-X, -Y, -Z}
⎱ Ry if S ∈ {+X, +Y, +Z}
⎧ 0 if S ∈ {-X, +X}
p = z + ⎨ Rz if S ∈ {-Y, +Y}
⎩ 2Rz if S ∈ {-Z, +Z}
```
Visually, in a left-handed coordinate system with Y up, viewed from the
right, the 3D texture looks like a stacked series of voxel grids, one
for
each cube side, in this order:
| **+X** | **+Y** | **+Z** |
| ------ | ------ | ------ |
| **-X** | **-Y** | **-Z** |
A terminology note: Other engines may refer to irradiance volumes as
*voxel
global illumination*, *VXGI*, or simply as *light probes*. Sometimes
*light
probe* refers to what Bevy calls a reflection probe. In Bevy, *light
probe*
is a generic term that encompasses all cuboid bounding regions that
capture
indirect illumination, whether based on voxels or not.
Note that, if binding arrays aren't supported (e.g. on WebGPU or WebGL
2),
then only the closest irradiance volume to the view will be taken into
account during rendering.
[*ambient cubes*]:
https://advances.realtimerendering.com/s2006/Mitchell-ShadingInValvesSourceEngine.pdf
[Mitchell 2006]:
https://advances.realtimerendering.com/s2006/Mitchell-ShadingInValvesSourceEngine.pdf
[Blender]: http://blender.org/
[baking tool]:
https://docs.blender.org/manual/en/latest/render/eevee/render_settings/indirect_lighting.html
[`bevy-baked-gi`]: https://github.com/pcwalton/bevy-baked-gi
### Implementation notes
This patch generalizes light probes so as to reuse as much code as
possible between irradiance volumes and the existing reflection probes.
This approach was chosen because both techniques share numerous
similarities:
1. Both irradiance volumes and reflection probes are cuboid bounding
regions.
2. Both are responsible for providing baked indirect light.
3. Both techniques involve presenting a variable number of textures to
the shader from which indirect light is sampled. (In the current
implementation, this uses binding arrays.)
4. Both irradiance volumes and reflection probes require gathering and
sorting probes by distance on CPU.
5. Both techniques require the GPU to search through a list of bounding
regions.
6. Both will eventually want to have falloff so that we can smoothly
blend as objects enter and exit the probes' influence ranges. (This is
not implemented yet to keep this patch relatively small and reviewable.)
To do this, we generalize most of the methods in the reflection probes
patch #11366 to be generic over a trait, `LightProbeComponent`. This
trait is implemented by both `EnvironmentMapLight` (for reflection
probes) and `IrradianceVolume` (for irradiance volumes). Using a trait
will allow us to add more types of light probes in the future. In
particular, I highly suspect we will want real-time reflection planes
for mirrors in the future, which can be easily slotted into this
framework.
## Changelog
> This section is optional. If this was a trivial fix, or has no
externally-visible impact, you can delete this section.
### Added
* A new `IrradianceVolume` asset type is available for baked voxelized
light probes. You can bake the global illumination using Blender or
another tool of your choice and use it in Bevy to apply indirect
illumination to dynamic objects.
2024-02-06 23:23:20 +00:00
|
|
|
#endif
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(18) var irradiance_volume_sampler: sampler;
|
2024-02-17 01:49:46 +00:00
|
|
|
#endif
|
Implement irradiance volumes. (#10268)
# Objective
Bevy could benefit from *irradiance volumes*, also known as *voxel
global illumination* or simply as light probes (though this term is not
preferred, as multiple techniques can be called light probes).
Irradiance volumes are a form of baked global illumination; they work by
sampling the light at the centers of each voxel within a cuboid. At
runtime, the voxels surrounding the fragment center are sampled and
interpolated to produce indirect diffuse illumination.
## Solution
This is divided into two sections. The first is copied and pasted from
the irradiance volume module documentation and describes the technique.
The second part consists of notes on the implementation.
### Overview
An *irradiance volume* is a cuboid voxel region consisting of
regularly-spaced precomputed samples of diffuse indirect light. They're
ideal if you have a dynamic object such as a character that can move
about
static non-moving geometry such as a level in a game, and you want that
dynamic object to be affected by the light bouncing off that static
geometry.
To use irradiance volumes, you need to precompute, or *bake*, the
indirect
light in your scene. Bevy doesn't currently come with a way to do this.
Fortunately, [Blender] provides a [baking tool] as part of the Eevee
renderer, and its irradiance volumes are compatible with those used by
Bevy.
The [`bevy-baked-gi`] project provides a tool, `export-blender-gi`, that
can
extract the baked irradiance volumes from the Blender `.blend` file and
package them up into a `.ktx2` texture for use by the engine. See the
documentation in the `bevy-baked-gi` project for more details as to this
workflow.
Like all light probes in Bevy, irradiance volumes are 1×1×1 cubes that
can
be arbitrarily scaled, rotated, and positioned in a scene with the
[`bevy_transform::components::Transform`] component. The 3D voxel grid
will
be stretched to fill the interior of the cube, and the illumination from
the
irradiance volume will apply to all fragments within that bounding
region.
Bevy's irradiance volumes are based on Valve's [*ambient cubes*] as used
in
*Half-Life 2* ([Mitchell 2006], slide 27). These encode a single color
of
light from the six 3D cardinal directions and blend the sides together
according to the surface normal.
The primary reason for choosing ambient cubes is to match Blender, so
that
its Eevee renderer can be used for baking. However, they also have some
advantages over the common second-order spherical harmonics approach:
ambient cubes don't suffer from ringing artifacts, they are smaller (6
colors for ambient cubes as opposed to 9 for spherical harmonics), and
evaluation is faster. A smaller basis allows for a denser grid of voxels
with the same storage requirements.
If you wish to use a tool other than `export-blender-gi` to produce the
irradiance volumes, you'll need to pack the irradiance volumes in the
following format. The irradiance volume of resolution *(Rx, Ry, Rz)* is
expected to be a 3D texture of dimensions *(Rx, 2Ry, 3Rz)*. The
unnormalized
texture coordinate *(s, t, p)* of the voxel at coordinate *(x, y, z)*
with
side *S* ∈ *{-X, +X, -Y, +Y, -Z, +Z}* is as follows:
```text
s = x
t = y + ⎰ 0 if S ∈ {-X, -Y, -Z}
⎱ Ry if S ∈ {+X, +Y, +Z}
⎧ 0 if S ∈ {-X, +X}
p = z + ⎨ Rz if S ∈ {-Y, +Y}
⎩ 2Rz if S ∈ {-Z, +Z}
```
Visually, in a left-handed coordinate system with Y up, viewed from the
right, the 3D texture looks like a stacked series of voxel grids, one
for
each cube side, in this order:
| **+X** | **+Y** | **+Z** |
| ------ | ------ | ------ |
| **-X** | **-Y** | **-Z** |
A terminology note: Other engines may refer to irradiance volumes as
*voxel
global illumination*, *VXGI*, or simply as *light probes*. Sometimes
*light
probe* refers to what Bevy calls a reflection probe. In Bevy, *light
probe*
is a generic term that encompasses all cuboid bounding regions that
capture
indirect illumination, whether based on voxels or not.
Note that, if binding arrays aren't supported (e.g. on WebGPU or WebGL
2),
then only the closest irradiance volume to the view will be taken into
account during rendering.
[*ambient cubes*]:
https://advances.realtimerendering.com/s2006/Mitchell-ShadingInValvesSourceEngine.pdf
[Mitchell 2006]:
https://advances.realtimerendering.com/s2006/Mitchell-ShadingInValvesSourceEngine.pdf
[Blender]: http://blender.org/
[baking tool]:
https://docs.blender.org/manual/en/latest/render/eevee/render_settings/indirect_lighting.html
[`bevy-baked-gi`]: https://github.com/pcwalton/bevy-baked-gi
### Implementation notes
This patch generalizes light probes so as to reuse as much code as
possible between irradiance volumes and the existing reflection probes.
This approach was chosen because both techniques share numerous
similarities:
1. Both irradiance volumes and reflection probes are cuboid bounding
regions.
2. Both are responsible for providing baked indirect light.
3. Both techniques involve presenting a variable number of textures to
the shader from which indirect light is sampled. (In the current
implementation, this uses binding arrays.)
4. Both irradiance volumes and reflection probes require gathering and
sorting probes by distance on CPU.
5. Both techniques require the GPU to search through a list of bounding
regions.
6. Both will eventually want to have falloff so that we can smoothly
blend as objects enter and exit the probes' influence ranges. (This is
not implemented yet to keep this patch relatively small and reviewable.)
To do this, we generalize most of the methods in the reflection probes
patch #11366 to be generic over a trait, `LightProbeComponent`. This
trait is implemented by both `EnvironmentMapLight` (for reflection
probes) and `IrradianceVolume` (for irradiance volumes). Using a trait
will allow us to add more types of light probes in the future. In
particular, I highly suspect we will want real-time reflection planes
for mirrors in the future, which can be easily slotted into this
framework.
## Changelog
> This section is optional. If this was a trivial fix, or has no
externally-visible impact, you can delete this section.
### Added
* A new `IrradianceVolume` asset type is available for baked voxelized
light probes. You can bake the global illumination using Blender or
another tool of your choice and use it in Bevy to apply indirect
illumination to dynamic objects.
2024-02-06 23:23:20 +00:00
|
|
|
|
|
|
|
|
// NB: If you change these, make sure to update `tonemapping_shared.wgsl` too.
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(19) var dt_lut_texture: texture_3d<f32>;
|
|
|
|
|
@group(0) @binding(20) var dt_lut_sampler: sampler;
|
2023-02-19 20:38:13 +00:00
|
|
|
|
|
|
|
|
#ifdef MULTISAMPLED
|

Variable `MeshPipeline` View Bind Group Layout (#10156)
# Objective
This PR aims to make it so that we don't accidentally go over
`MAX_TEXTURE_IMAGE_UNITS` (in WebGL) or
`maxSampledTexturesPerShaderStage` (in WebGPU), giving us some extra
leeway to add more view bind group textures.
(This PR is extracted from—and unblocks—#8015)
## Solution
- We replace the existing `view_layout` and `view_layout_multisampled`
pair with an array of 32 bind group layouts, generated ahead of time;
- For now, these layouts cover all the possible combinations of:
`multisampled`, `depth_prepass`, `normal_prepass`,
`motion_vector_prepass` and `deferred_prepass`:
- In the future, as @JMS55 pointed out, we can likely take out
`motion_vector_prepass` and `deferred_prepass`, as these are not really
needed for the mesh pipeline and can use separate pipelines. This would
bring the possible combinations down to 8;
- We can also add more "optional" textures as they become needed,
allowing the engine to scale to a wider variety of use cases in lower
end/web environments (e.g. some apps might just want normal and depth
prepasses, others might only want light probes), while still keeping a
high ceiling for high end native environments where more textures are
supported.
- While preallocating bind group layouts is relatively cheap, the number
of combinations grows exponentially, so we should likely limit ourselves
to something like at most 256–1024 total layouts until we find a better
solution (like generating them lazily)
- To make this mechanism a little bit more explicit/discoverable, so
that compatibility with WebGPU/WebGL is not broken by accident, we add a
`MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` const and warn whenever
the number of textures in the layout crosses it.
- The warning is gated by `#[cfg(debug_assertions)]` and not issued in
release builds;
- We're counting the actual textures in the bind group layout instead of
using some roundabout metric so it should be accurate;
- Right now `MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` is set to 10
in order to leave 6 textures free for other groups;
- Currently there's no combination that would cause us to go over the
limit, but that will change once #8015 lands.
---
## Changelog
- `MeshPipeline` view bind group layouts now vary based on the current
multisampling and prepass states, saving a couple of texture binding
entries when prepasses are not in use.
## Migration Guide
- `MeshPipeline::view_layout` and
`MeshPipeline::view_layout_multisampled` have been replaced with a
private array to accomodate for variable view bind group layouts. To
obtain a view bind group layout for the current pipeline state, use the
new `MeshPipeline::get_view_layout()` or
`MeshPipeline::get_view_layout_from_key()` methods.
2023-10-21 11:19:44 +00:00
|
|
|
#ifdef DEPTH_PREPASS
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(21) var depth_prepass_texture: texture_depth_multisampled_2d;
|
Variable `MeshPipeline` View Bind Group Layout (#10156)
# Objective
This PR aims to make it so that we don't accidentally go over
`MAX_TEXTURE_IMAGE_UNITS` (in WebGL) or
`maxSampledTexturesPerShaderStage` (in WebGPU), giving us some extra
leeway to add more view bind group textures.
(This PR is extracted from—and unblocks—#8015)
## Solution
- We replace the existing `view_layout` and `view_layout_multisampled`
pair with an array of 32 bind group layouts, generated ahead of time;
- For now, these layouts cover all the possible combinations of:
`multisampled`, `depth_prepass`, `normal_prepass`,
`motion_vector_prepass` and `deferred_prepass`:
- In the future, as @JMS55 pointed out, we can likely take out
`motion_vector_prepass` and `deferred_prepass`, as these are not really
needed for the mesh pipeline and can use separate pipelines. This would
bring the possible combinations down to 8;
- We can also add more "optional" textures as they become needed,
allowing the engine to scale to a wider variety of use cases in lower
end/web environments (e.g. some apps might just want normal and depth
prepasses, others might only want light probes), while still keeping a
high ceiling for high end native environments where more textures are
supported.
- While preallocating bind group layouts is relatively cheap, the number
of combinations grows exponentially, so we should likely limit ourselves
to something like at most 256–1024 total layouts until we find a better
solution (like generating them lazily)
- To make this mechanism a little bit more explicit/discoverable, so
that compatibility with WebGPU/WebGL is not broken by accident, we add a
`MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` const and warn whenever
the number of textures in the layout crosses it.
- The warning is gated by `#[cfg(debug_assertions)]` and not issued in
release builds;
- We're counting the actual textures in the bind group layout instead of
using some roundabout metric so it should be accurate;
- Right now `MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` is set to 10
in order to leave 6 textures free for other groups;
- Currently there's no combination that would cause us to go over the
limit, but that will change once #8015 lands.
---
## Changelog
- `MeshPipeline` view bind group layouts now vary based on the current
multisampling and prepass states, saving a couple of texture binding
entries when prepasses are not in use.
## Migration Guide
- `MeshPipeline::view_layout` and
`MeshPipeline::view_layout_multisampled` have been replaced with a
private array to accomodate for variable view bind group layouts. To
obtain a view bind group layout for the current pipeline state, use the
new `MeshPipeline::get_view_layout()` or
`MeshPipeline::get_view_layout_from_key()` methods.
2023-10-21 11:19:44 +00:00
|
|
|
#endif // DEPTH_PREPASS
|
|
|
|
|
#ifdef NORMAL_PREPASS
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(22) var normal_prepass_texture: texture_multisampled_2d<f32>;
|
Variable `MeshPipeline` View Bind Group Layout (#10156)
# Objective
This PR aims to make it so that we don't accidentally go over
`MAX_TEXTURE_IMAGE_UNITS` (in WebGL) or
`maxSampledTexturesPerShaderStage` (in WebGPU), giving us some extra
leeway to add more view bind group textures.
(This PR is extracted from—and unblocks—#8015)
## Solution
- We replace the existing `view_layout` and `view_layout_multisampled`
pair with an array of 32 bind group layouts, generated ahead of time;
- For now, these layouts cover all the possible combinations of:
`multisampled`, `depth_prepass`, `normal_prepass`,
`motion_vector_prepass` and `deferred_prepass`:
- In the future, as @JMS55 pointed out, we can likely take out
`motion_vector_prepass` and `deferred_prepass`, as these are not really
needed for the mesh pipeline and can use separate pipelines. This would
bring the possible combinations down to 8;
- We can also add more "optional" textures as they become needed,
allowing the engine to scale to a wider variety of use cases in lower
end/web environments (e.g. some apps might just want normal and depth
prepasses, others might only want light probes), while still keeping a
high ceiling for high end native environments where more textures are
supported.
- While preallocating bind group layouts is relatively cheap, the number
of combinations grows exponentially, so we should likely limit ourselves
to something like at most 256–1024 total layouts until we find a better
solution (like generating them lazily)
- To make this mechanism a little bit more explicit/discoverable, so
that compatibility with WebGPU/WebGL is not broken by accident, we add a
`MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` const and warn whenever
the number of textures in the layout crosses it.
- The warning is gated by `#[cfg(debug_assertions)]` and not issued in
release builds;
- We're counting the actual textures in the bind group layout instead of
using some roundabout metric so it should be accurate;
- Right now `MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` is set to 10
in order to leave 6 textures free for other groups;
- Currently there's no combination that would cause us to go over the
limit, but that will change once #8015 lands.
---
## Changelog
- `MeshPipeline` view bind group layouts now vary based on the current
multisampling and prepass states, saving a couple of texture binding
entries when prepasses are not in use.
## Migration Guide
- `MeshPipeline::view_layout` and
`MeshPipeline::view_layout_multisampled` have been replaced with a
private array to accomodate for variable view bind group layouts. To
obtain a view bind group layout for the current pipeline state, use the
new `MeshPipeline::get_view_layout()` or
`MeshPipeline::get_view_layout_from_key()` methods.
2023-10-21 11:19:44 +00:00
|
|
|
#endif // NORMAL_PREPASS
|
|
|
|
|
#ifdef MOTION_VECTOR_PREPASS
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(23) var motion_vector_prepass_texture: texture_multisampled_2d<f32>;
|
Variable `MeshPipeline` View Bind Group Layout (#10156)
# Objective
This PR aims to make it so that we don't accidentally go over
`MAX_TEXTURE_IMAGE_UNITS` (in WebGL) or
`maxSampledTexturesPerShaderStage` (in WebGPU), giving us some extra
leeway to add more view bind group textures.
(This PR is extracted from—and unblocks—#8015)
## Solution
- We replace the existing `view_layout` and `view_layout_multisampled`
pair with an array of 32 bind group layouts, generated ahead of time;
- For now, these layouts cover all the possible combinations of:
`multisampled`, `depth_prepass`, `normal_prepass`,
`motion_vector_prepass` and `deferred_prepass`:
- In the future, as @JMS55 pointed out, we can likely take out
`motion_vector_prepass` and `deferred_prepass`, as these are not really
needed for the mesh pipeline and can use separate pipelines. This would
bring the possible combinations down to 8;
- We can also add more "optional" textures as they become needed,
allowing the engine to scale to a wider variety of use cases in lower
end/web environments (e.g. some apps might just want normal and depth
prepasses, others might only want light probes), while still keeping a
high ceiling for high end native environments where more textures are
supported.
- While preallocating bind group layouts is relatively cheap, the number
of combinations grows exponentially, so we should likely limit ourselves
to something like at most 256–1024 total layouts until we find a better
solution (like generating them lazily)
- To make this mechanism a little bit more explicit/discoverable, so
that compatibility with WebGPU/WebGL is not broken by accident, we add a
`MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` const and warn whenever
the number of textures in the layout crosses it.
- The warning is gated by `#[cfg(debug_assertions)]` and not issued in
release builds;
- We're counting the actual textures in the bind group layout instead of
using some roundabout metric so it should be accurate;
- Right now `MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` is set to 10
in order to leave 6 textures free for other groups;
- Currently there's no combination that would cause us to go over the
limit, but that will change once #8015 lands.
---
## Changelog
- `MeshPipeline` view bind group layouts now vary based on the current
multisampling and prepass states, saving a couple of texture binding
entries when prepasses are not in use.
## Migration Guide
- `MeshPipeline::view_layout` and
`MeshPipeline::view_layout_multisampled` have been replaced with a
private array to accomodate for variable view bind group layouts. To
obtain a view bind group layout for the current pipeline state, use the
new `MeshPipeline::get_view_layout()` or
`MeshPipeline::get_view_layout_from_key()` methods.
2023-10-21 11:19:44 +00:00
|
|
|
#endif // MOTION_VECTOR_PREPASS
|
|
|
|
|
|
|
|
|
|
#else // MULTISAMPLED
|
|
|
|
|
|
|
|
|
|
#ifdef DEPTH_PREPASS
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(21) var depth_prepass_texture: texture_depth_2d;
|
Variable `MeshPipeline` View Bind Group Layout (#10156)
# Objective
This PR aims to make it so that we don't accidentally go over
`MAX_TEXTURE_IMAGE_UNITS` (in WebGL) or
`maxSampledTexturesPerShaderStage` (in WebGPU), giving us some extra
leeway to add more view bind group textures.
(This PR is extracted from—and unblocks—#8015)
## Solution
- We replace the existing `view_layout` and `view_layout_multisampled`
pair with an array of 32 bind group layouts, generated ahead of time;
- For now, these layouts cover all the possible combinations of:
`multisampled`, `depth_prepass`, `normal_prepass`,
`motion_vector_prepass` and `deferred_prepass`:
- In the future, as @JMS55 pointed out, we can likely take out
`motion_vector_prepass` and `deferred_prepass`, as these are not really
needed for the mesh pipeline and can use separate pipelines. This would
bring the possible combinations down to 8;
- We can also add more "optional" textures as they become needed,
allowing the engine to scale to a wider variety of use cases in lower
end/web environments (e.g. some apps might just want normal and depth
prepasses, others might only want light probes), while still keeping a
high ceiling for high end native environments where more textures are
supported.
- While preallocating bind group layouts is relatively cheap, the number
of combinations grows exponentially, so we should likely limit ourselves
to something like at most 256–1024 total layouts until we find a better
solution (like generating them lazily)
- To make this mechanism a little bit more explicit/discoverable, so
that compatibility with WebGPU/WebGL is not broken by accident, we add a
`MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` const and warn whenever
the number of textures in the layout crosses it.
- The warning is gated by `#[cfg(debug_assertions)]` and not issued in
release builds;
- We're counting the actual textures in the bind group layout instead of
using some roundabout metric so it should be accurate;
- Right now `MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` is set to 10
in order to leave 6 textures free for other groups;
- Currently there's no combination that would cause us to go over the
limit, but that will change once #8015 lands.
---
## Changelog
- `MeshPipeline` view bind group layouts now vary based on the current
multisampling and prepass states, saving a couple of texture binding
entries when prepasses are not in use.
## Migration Guide
- `MeshPipeline::view_layout` and
`MeshPipeline::view_layout_multisampled` have been replaced with a
private array to accomodate for variable view bind group layouts. To
obtain a view bind group layout for the current pipeline state, use the
new `MeshPipeline::get_view_layout()` or
`MeshPipeline::get_view_layout_from_key()` methods.
2023-10-21 11:19:44 +00:00
|
|
|
#endif // DEPTH_PREPASS
|
|
|
|
|
#ifdef NORMAL_PREPASS
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(22) var normal_prepass_texture: texture_2d<f32>;
|
Variable `MeshPipeline` View Bind Group Layout (#10156)
# Objective
This PR aims to make it so that we don't accidentally go over
`MAX_TEXTURE_IMAGE_UNITS` (in WebGL) or
`maxSampledTexturesPerShaderStage` (in WebGPU), giving us some extra
leeway to add more view bind group textures.
(This PR is extracted from—and unblocks—#8015)
## Solution
- We replace the existing `view_layout` and `view_layout_multisampled`
pair with an array of 32 bind group layouts, generated ahead of time;
- For now, these layouts cover all the possible combinations of:
`multisampled`, `depth_prepass`, `normal_prepass`,
`motion_vector_prepass` and `deferred_prepass`:
- In the future, as @JMS55 pointed out, we can likely take out
`motion_vector_prepass` and `deferred_prepass`, as these are not really
needed for the mesh pipeline and can use separate pipelines. This would
bring the possible combinations down to 8;
- We can also add more "optional" textures as they become needed,
allowing the engine to scale to a wider variety of use cases in lower
end/web environments (e.g. some apps might just want normal and depth
prepasses, others might only want light probes), while still keeping a
high ceiling for high end native environments where more textures are
supported.
- While preallocating bind group layouts is relatively cheap, the number
of combinations grows exponentially, so we should likely limit ourselves
to something like at most 256–1024 total layouts until we find a better
solution (like generating them lazily)
- To make this mechanism a little bit more explicit/discoverable, so
that compatibility with WebGPU/WebGL is not broken by accident, we add a
`MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` const and warn whenever
the number of textures in the layout crosses it.
- The warning is gated by `#[cfg(debug_assertions)]` and not issued in
release builds;
- We're counting the actual textures in the bind group layout instead of
using some roundabout metric so it should be accurate;
- Right now `MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` is set to 10
in order to leave 6 textures free for other groups;
- Currently there's no combination that would cause us to go over the
limit, but that will change once #8015 lands.
---
## Changelog
- `MeshPipeline` view bind group layouts now vary based on the current
multisampling and prepass states, saving a couple of texture binding
entries when prepasses are not in use.
## Migration Guide
- `MeshPipeline::view_layout` and
`MeshPipeline::view_layout_multisampled` have been replaced with a
private array to accomodate for variable view bind group layouts. To
obtain a view bind group layout for the current pipeline state, use the
new `MeshPipeline::get_view_layout()` or
`MeshPipeline::get_view_layout_from_key()` methods.
2023-10-21 11:19:44 +00:00
|
|
|
#endif // NORMAL_PREPASS
|
|
|
|
|
#ifdef MOTION_VECTOR_PREPASS
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(23) var motion_vector_prepass_texture: texture_2d<f32>;
|
Variable `MeshPipeline` View Bind Group Layout (#10156)
# Objective
This PR aims to make it so that we don't accidentally go over
`MAX_TEXTURE_IMAGE_UNITS` (in WebGL) or
`maxSampledTexturesPerShaderStage` (in WebGPU), giving us some extra
leeway to add more view bind group textures.
(This PR is extracted from—and unblocks—#8015)
## Solution
- We replace the existing `view_layout` and `view_layout_multisampled`
pair with an array of 32 bind group layouts, generated ahead of time;
- For now, these layouts cover all the possible combinations of:
`multisampled`, `depth_prepass`, `normal_prepass`,
`motion_vector_prepass` and `deferred_prepass`:
- In the future, as @JMS55 pointed out, we can likely take out
`motion_vector_prepass` and `deferred_prepass`, as these are not really
needed for the mesh pipeline and can use separate pipelines. This would
bring the possible combinations down to 8;
- We can also add more "optional" textures as they become needed,
allowing the engine to scale to a wider variety of use cases in lower
end/web environments (e.g. some apps might just want normal and depth
prepasses, others might only want light probes), while still keeping a
high ceiling for high end native environments where more textures are
supported.
- While preallocating bind group layouts is relatively cheap, the number
of combinations grows exponentially, so we should likely limit ourselves
to something like at most 256–1024 total layouts until we find a better
solution (like generating them lazily)
- To make this mechanism a little bit more explicit/discoverable, so
that compatibility with WebGPU/WebGL is not broken by accident, we add a
`MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` const and warn whenever
the number of textures in the layout crosses it.
- The warning is gated by `#[cfg(debug_assertions)]` and not issued in
release builds;
- We're counting the actual textures in the bind group layout instead of
using some roundabout metric so it should be accurate;
- Right now `MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` is set to 10
in order to leave 6 textures free for other groups;
- Currently there's no combination that would cause us to go over the
limit, but that will change once #8015 lands.
---
## Changelog
- `MeshPipeline` view bind group layouts now vary based on the current
multisampling and prepass states, saving a couple of texture binding
entries when prepasses are not in use.
## Migration Guide
- `MeshPipeline::view_layout` and
`MeshPipeline::view_layout_multisampled` have been replaced with a
private array to accomodate for variable view bind group layouts. To
obtain a view bind group layout for the current pipeline state, use the
new `MeshPipeline::get_view_layout()` or
`MeshPipeline::get_view_layout_from_key()` methods.
2023-10-21 11:19:44 +00:00
|
|
|
#endif // MOTION_VECTOR_PREPASS
|
|
|
|
|
|
|
|
|
|
#endif // MULTISAMPLED
|
|
|
|
|
|
|
|
|
|
#ifdef DEFERRED_PREPASS
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(24) var deferred_prepass_texture: texture_2d<u32>;
|
Variable `MeshPipeline` View Bind Group Layout (#10156)
# Objective
This PR aims to make it so that we don't accidentally go over
`MAX_TEXTURE_IMAGE_UNITS` (in WebGL) or
`maxSampledTexturesPerShaderStage` (in WebGPU), giving us some extra
leeway to add more view bind group textures.
(This PR is extracted from—and unblocks—#8015)
## Solution
- We replace the existing `view_layout` and `view_layout_multisampled`
pair with an array of 32 bind group layouts, generated ahead of time;
- For now, these layouts cover all the possible combinations of:
`multisampled`, `depth_prepass`, `normal_prepass`,
`motion_vector_prepass` and `deferred_prepass`:
- In the future, as @JMS55 pointed out, we can likely take out
`motion_vector_prepass` and `deferred_prepass`, as these are not really
needed for the mesh pipeline and can use separate pipelines. This would
bring the possible combinations down to 8;
- We can also add more "optional" textures as they become needed,
allowing the engine to scale to a wider variety of use cases in lower
end/web environments (e.g. some apps might just want normal and depth
prepasses, others might only want light probes), while still keeping a
high ceiling for high end native environments where more textures are
supported.
- While preallocating bind group layouts is relatively cheap, the number
of combinations grows exponentially, so we should likely limit ourselves
to something like at most 256–1024 total layouts until we find a better
solution (like generating them lazily)
- To make this mechanism a little bit more explicit/discoverable, so
that compatibility with WebGPU/WebGL is not broken by accident, we add a
`MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` const and warn whenever
the number of textures in the layout crosses it.
- The warning is gated by `#[cfg(debug_assertions)]` and not issued in
release builds;
- We're counting the actual textures in the bind group layout instead of
using some roundabout metric so it should be accurate;
- Right now `MESH_PIPELINE_VIEW_LAYOUT_SAFE_MAX_TEXTURES` is set to 10
in order to leave 6 textures free for other groups;
- Currently there's no combination that would cause us to go over the
limit, but that will change once #8015 lands.
---
## Changelog
- `MeshPipeline` view bind group layouts now vary based on the current
multisampling and prepass states, saving a couple of texture binding
entries when prepasses are not in use.
## Migration Guide
- `MeshPipeline::view_layout` and
`MeshPipeline::view_layout_multisampled` have been replaced with a
private array to accomodate for variable view bind group layouts. To
obtain a view bind group layout for the current pipeline state, use the
new `MeshPipeline::get_view_layout()` or
`MeshPipeline::get_view_layout_from_key()` methods.
2023-10-21 11:19:44 +00:00
|
|
|
#endif // DEFERRED_PREPASS
|
`StandardMaterial` Light Transmission (#8015)
# Objective
<img width="1920" alt="Screenshot 2023-04-26 at 01 07 34"
src="https://user-images.githubusercontent.com/418473/234467578-0f34187b-5863-4ea1-88e9-7a6bb8ce8da3.png">
This PR adds both diffuse and specular light transmission capabilities
to the `StandardMaterial`, with support for screen space refractions.
This enables realistically representing a wide range of real-world
materials, such as:
- Glass; (Including frosted glass)
- Transparent and translucent plastics;
- Various liquids and gels;
- Gemstones;
- Marble;
- Wax;
- Paper;
- Leaves;
- Porcelain.
Unlike existing support for transparency, light transmission does not
rely on fixed function alpha blending, and therefore works with both
`AlphaMode::Opaque` and `AlphaMode::Mask` materials.
## Solution
- Introduces a number of transmission related fields in the
`StandardMaterial`;
- For specular transmission:
- Adds logic to take a view main texture snapshot after the opaque
phase; (in order to perform screen space refractions)
- Introduces a new `Transmissive3d` phase to the renderer, to which all
meshes with `transmission > 0.0` materials are sent.
- Calculates a light exit point (of the approximate mesh volume) using
`ior` and `thickness` properties
- Samples the snapshot texture with an adaptive number of taps across a
`roughness`-controlled radius enabling “blurry” refractions
- For diffuse transmission:
- Approximates transmitted diffuse light by using a second, flipped +
displaced, diffuse-only Lambertian lobe for each light source.
## To Do
- [x] Figure out where `fresnel_mix()` is taking place, if at all, and
where `dielectric_specular` is being calculated, if at all, and update
them to use the `ior` value (Not a blocker, just a nice-to-have for more
correct BSDF)
- To the _best of my knowledge, this is now taking place, after
964340cdd. The fresnel mix is actually "split" into two parts in our
implementation, one `(1 - fresnel(...))` in the transmission, and
`fresnel()` in the light implementations. A surface with more
reflectance now will produce slightly dimmer transmission towards the
grazing angle, as more of the light gets reflected.
- [x] Add `transmission_texture`
- [x] Add `diffuse_transmission_texture`
- [x] Add `thickness_texture`
- [x] Add `attenuation_distance` and `attenuation_color`
- [x] Connect values to glTF loader
- [x] `transmission` and `transmission_texture`
- [x] `thickness` and `thickness_texture`
- [x] `ior`
- [ ] `diffuse_transmission` and `diffuse_transmission_texture` (needs
upstream support in `gltf` crate, not a blocker)
- [x] Add support for multiple screen space refraction “steps”
- [x] Conditionally create no transmission snapshot texture at all if
`steps == 0`
- [x] Conditionally enable/disable screen space refraction transmission
snapshots
- [x] Read from depth pre-pass to prevent refracting pixels in front of
the light exit point
- [x] Use `interleaved_gradient_noise()` function for sampling blur in a
way that benefits from TAA
- [x] Drill down a TAA `#define`, tweak some aspects of the effect
conditionally based on it
- [x] Remove const array that's crashing under HLSL (unless a new `naga`
release with https://github.com/gfx-rs/naga/pull/2496 comes out before
we merge this)
- [ ] Look into alternatives to the `switch` hack for dynamically
indexing the const array (might not be needed, compilers seem to be
decent at expanding it)
- [ ] Add pipeline keys for gating transmission (do we really want/need
this?)
- [x] Tweak some material field/function names?
## A Note on Texture Packing
_This was originally added as a comment to the
`specular_transmission_texture`, `thickness_texture` and
`diffuse_transmission_texture` documentation, I removed it since it was
more confusing than helpful, and will likely be made redundant/will need
to be updated once we have a better infrastructure for preprocessing
assets_
Due to how channels are mapped, you can more efficiently use a single
shared texture image
for configuring the following:
- R - `specular_transmission_texture`
- G - `thickness_texture`
- B - _unused_
- A - `diffuse_transmission_texture`
The `KHR_materials_diffuse_transmission` glTF extension also defines a
`diffuseTransmissionColorTexture`,
that _we don't currently support_. One might choose to pack the
intensity and color textures together,
using RGB for the color and A for the intensity, in which case this
packing advice doesn't really apply.
---
## Changelog
- Added a new `Transmissive3d` render phase for rendering specular
transmissive materials with screen space refractions
- Added rendering support for transmitted environment map light on the
`StandardMaterial` as a fallback for screen space refractions
- Added `diffuse_transmission`, `specular_transmission`, `thickness`,
`ior`, `attenuation_distance` and `attenuation_color` to the
`StandardMaterial`
- Added `diffuse_transmission_texture`, `specular_transmission_texture`,
`thickness_texture` to the `StandardMaterial`, gated behind a new
`pbr_transmission_textures` cargo feature (off by default, for maximum
hardware compatibility)
- Added `Camera3d::screen_space_specular_transmission_steps` for
controlling the number of “layers of transparency” rendered for
transmissive objects
- Added a `TransmittedShadowReceiver` component for enabling shadows in
(diffusely) transmitted light. (disabled by default, as it requires
carefully setting up the `thickness` to avoid self-shadow artifacts)
- Added support for the `KHR_materials_transmission`,
`KHR_materials_ior` and `KHR_materials_volume` glTF extensions
- Renamed items related to temporal jitter for greater consistency
## Migration Guide
- `SsaoPipelineKey::temporal_noise` has been renamed to
`SsaoPipelineKey::temporal_jitter`
- The `TAA` shader def (controlled by the presence of the
`TemporalAntiAliasSettings` component in the camera) has been replaced
with the `TEMPORAL_JITTER` shader def (controlled by the presence of the
`TemporalJitter` component in the camera)
- `MeshPipelineKey::TAA` has been replaced by
`MeshPipelineKey::TEMPORAL_JITTER`
- The `TEMPORAL_NOISE` shader def has been consolidated with
`TEMPORAL_JITTER`
2023-10-31 20:59:02 +00:00
|
|
|
|
Implement visibility ranges, also known as hierarchical levels of detail (HLODs). (#12916)
Implement visibility ranges, also known as hierarchical levels of detail
(HLODs).
This commit introduces a new component, `VisibilityRange`, which allows
developers to specify camera distances in which meshes are to be shown
and hidden. Hiding meshes happens early in the rendering pipeline, so
this feature can be used for level of detail optimization. Additionally,
this feature is properly evaluated per-view, so different views can show
different levels of detail.
This feature differs from proper mesh LODs, which can be implemented
later. Engines generally implement true mesh LODs later in the pipeline;
they're typically more efficient than HLODs with GPU-driven rendering.
However, mesh LODs are more limited than HLODs, because they require the
lower levels of detail to be meshes with the same vertex layout and
shader (and perhaps the same material) as the original mesh. Games often
want to use objects other than meshes to replace distant models, such as
*octahedral imposters* or *billboard imposters*.
The reason why the feature is called *hierarchical level of detail* is
that HLODs can replace multiple meshes with a single mesh when the
camera is far away. This can be useful for reducing drawcall count. Note
that `VisibilityRange` doesn't automatically propagate down to children;
it must be placed on every mesh.
Crossfading between different levels of detail is supported, using the
standard 4x4 ordered dithering pattern from [1]. The shader code to
compute the dithering patterns should be well-optimized. The dithering
code is only active when visibility ranges are in use for the mesh in
question, so that we don't lose early Z.
Cascaded shadow maps show the HLOD level of the view they're associated
with. Point light and spot light shadow maps, which have no CSMs,
display all HLOD levels that are visible in any view. To support this
efficiently and avoid doing visibility checks multiple times, we
precalculate all visible HLOD levels for each entity with a
`VisibilityRange` during the `check_visibility_range` system.
A new example, `visibility_range`, has been added to the tree, as well
as a new low-poly version of the flight helmet model to go with it. It
demonstrates use of the visibility range feature to provide levels of
detail.
[1]: https://en.wikipedia.org/wiki/Ordered_dithering#Threshold_map
[^1]: Unreal doesn't have a feature that exactly corresponds to
visibility ranges, but Unreal's HLOD system serves roughly the same
purpose.
## Changelog
### Added
* A new `VisibilityRange` component is available to conditionally enable
entity visibility at camera distances, with optional crossfade support.
This can be used to implement different levels of detail (LODs).
## Screenshots
High-poly model:

Low-poly model up close:

Crossfading between the two:

---------
Co-authored-by: Carter Anderson <mcanders1@gmail.com>
2024-05-03 00:11:35 +00:00
|
|
|
@group(0) @binding(25) var view_transmission_texture: texture_2d<f32>;
|
|
|
|
|
@group(0) @binding(26) var view_transmission_sampler: sampler;
|